
高光弱纹理物体表面鲁棒重建方法.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高光弱纹理物体表面鲁棒重建方法.docx
高光弱纹理物体表面鲁棒重建方法摘要高光弱纹理物体表面的鲁棒重建一直是计算机视觉领域中的研究热点问题之一。在本文中,我们提出了一种新的高光弱纹理物体表面鲁棒重建方法。该方法旨在利用不同的技术和方法,从不同的角度解决这一问题,提高重建的精度和鲁棒性。首先,该方法使用一种新的关键点检测算法,能够更好地检测到高光弱纹理物体表面上的关键点。该算法可以通过自适应阈值来检测出表面上较为明显的关键点,并且可以根据不同的局部特征来优化关键点的分布。其次,在关键点检测之后,我们使用了一种基于场景几何结构的点云配准算法。该算法

基于稠密光流的鲁棒运动估计与表面结构重建.docx
基于稠密光流的鲁棒运动估计与表面结构重建基于稠密光流的鲁棒运动估计与表面结构重建摘要:运动估计和表面结构重建是计算机视觉中的两个重要问题,对于许多应用领域具有重要意义。传统的光流算法在受到大幅度运动、视觉噪声等因素的干扰时往往无法得到准确的结果。本文提出了一种基于稠密光流的鲁棒运动估计与表面结构重建方法,通过引入稠密光流和鲁棒估计技术来提高运动估计的准确性和鲁棒性,并通过表面结构重建来进一步提升估计的质量。关键词:稠密光流、鲁棒估计、运动估计、表面结构重建1.引言运动估计是计算机视觉中的一个基础问题,广泛

基于多线结构光的弱纹理物体形貌测量方法.pptx
基于多线结构光的弱纹理物体形貌测量方法目录添加章节标题多线结构光测量原理结构光测量原理简介多线结构光的特点与优势测量系统的组成与工作流程弱纹理物体的形貌测量难点弱纹理物体的表面特性传统测量方法的局限性针对弱纹理物体的测量技术难点基于多线结构光的测量方法多线结构光投影技术图像采集与处理深度信息提取与计算物体形貌的三维重建实验验证与结果分析实验环境与数据采集实验结果展示结果分析与比较方法的有效性与优势应用前景与展望在工业检测领域的应用前景在文物保护领域的应用前景未来研究方向与技术挑战THANKYOU
弱纹理物体姿态跟踪方法、系统及装置.pdf
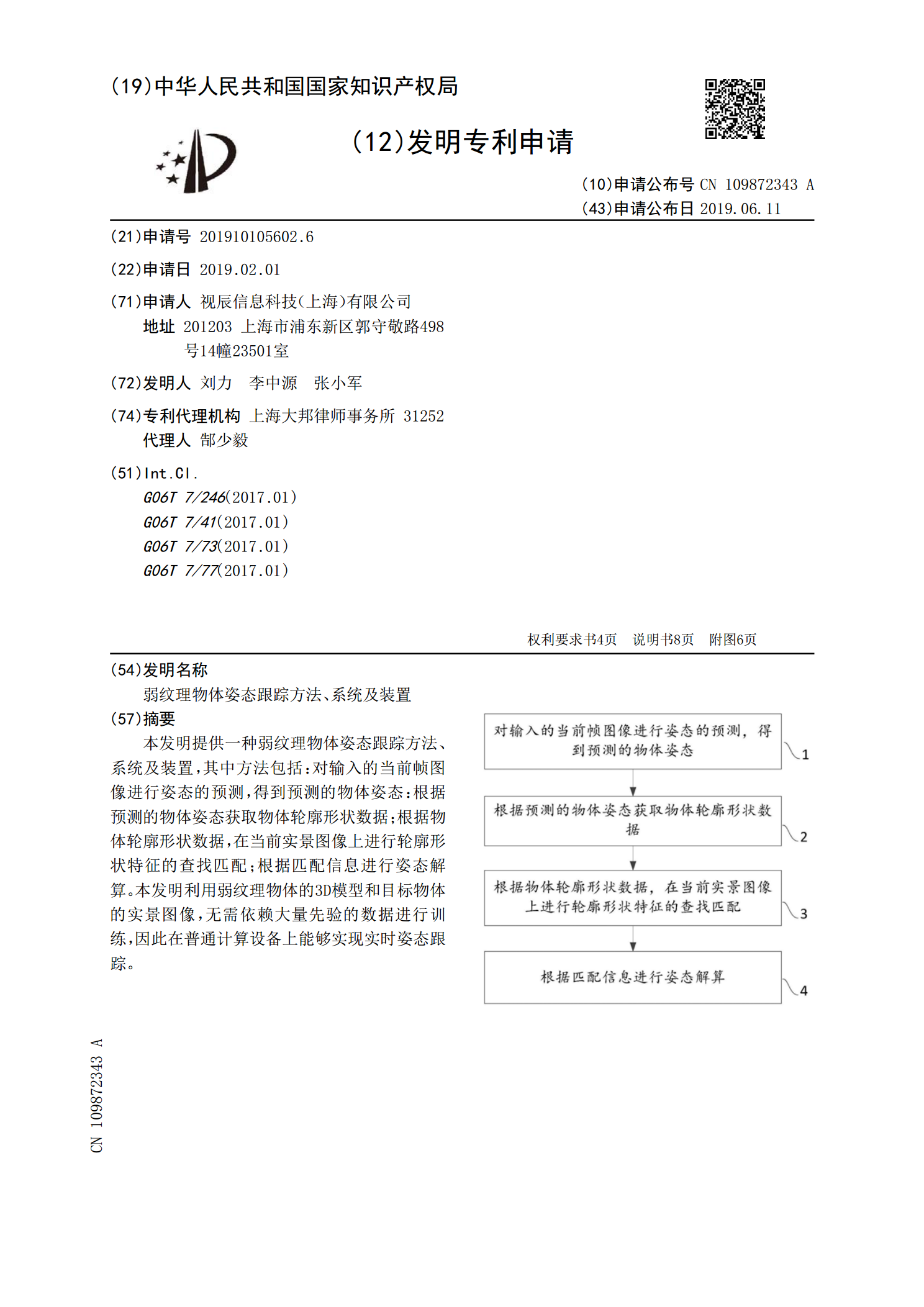
本发明提供一种弱纹理物体姿态跟踪方法、系统及装置,其中方法包括:对输入的当前帧图像进行姿态的预测,得到预测的物体姿态:根据预测的物体姿态获取物体轮廓形状数据;根据物体轮廓形状数据,在当前实景图像上进行轮廓形状特征的查找匹配;根据匹配信息进行姿态解算。本发明利用弱纹理物体的3D模型和目标物体的实景图像,无需依赖大量先验的数据进行训练,因此在普通计算设备上能够实现实时姿态跟踪。

一种鲁棒的基于光度立体视觉的表面重建方法.docx
一种鲁棒的基于光度立体视觉的表面重建方法基于光度立体视觉的表面重建是一种常用的三维重建方法,可以通过两个或多个视角的图像来构建场景的三维模型,并广泛应用于机器人导航、虚拟现实等领域。然而,在实际应用中,常会受到光照变化、阴影、表面材质等因素的影响,导致重建的准确性和稳定性出现问题。因此,本文提出一种鲁棒的基于光度立体视觉的表面重建方法,以提高重建结果的质量和可靠性。首先,我们采用双目相机获取场景的两个视角图像,并通过校正和匹配等预处理步骤将其对齐。然后,我们提出一种改进的匹配算法,以应对光照变化和阴影等问