
面向动作捕捉和定位的视觉惯性融合技术研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向动作捕捉和定位的视觉惯性融合技术研究.docx
面向动作捕捉和定位的视觉惯性融合技术研究标题:面向动作捕捉和定位的视觉惯性融合技术研究摘要:随着虚拟现实和增强现实的迅速发展,动作捕捉和定位已成为许多交互应用的重要技术。本论文旨在研究面向动作捕捉和定位的视觉惯性融合技术。首先,回顾了动作捕捉、定位和视觉惯性融合的基本概念和现有研究。然后,分析了视觉惯性融合在动作捕捉和定位中的应用和优势。接着,介绍了机器视觉和惯性测量单元(IMU)等相关技术。最后,针对不同应用场景,讨论了视觉惯性融合技术的挑战和未来研究方向。关键词:动作捕捉、定位、视觉惯性融合、机器视觉

面向室内SLAM的视觉惯性融合定位方法及系统.pdf
本发明涉及人工智能技术领域,提供一种面向室内SLAM的视觉惯性融合定位方法及系统,双目鱼眼摄像头获取视频图像数据,通过视频图像数据相邻帧之间的I‑LK光流法特征追踪,IMU采集位置和姿态数据,进行预积分处理;将多源数据进行松耦合后融合确定系统初始化参数值,由关键帧策略确定关键帧数据;关键帧数据通过视觉位姿初始化和IMU预积分对齐;外参在线标定、视觉惯性初始化和紧耦合非线性优化,由基于关键帧的滑动窗口构建移动机器人六自由度位姿,已知当前帧相机的位置,通过IMU信息可以预测场景的空间特征点在下一帧图像的位置,

无标记的光学测量与惯性测量融合动作捕捉技术研究.docx
无标记的光学测量与惯性测量融合动作捕捉技术研究无标记的光学测量与惯性测量融合动作捕捉技术研究摘要:随着虚拟现实(VR)和增强现实(AR)技术的快速发展,对于更真实、准确的人体动作捕捉需求正在不断增加。而无标记的光学测量与惯性测量融合的动作捕捉技术,凭借其高精度、高实时性的优势,逐渐成为了动作捕捉领域的研究热点。本文将针对无标记的光学测量与惯性测量融合动作捕捉技术进行研究,介绍其原理、方法和应用,并探讨其存在的问题及未来发展方向。关键词:无标记、光学测量、惯性测量、动作捕捉、融合一、引言动作捕捉技术是指通过

双目视觉惯性融合的同时定位与语义建图研究.docx
双目视觉惯性融合的同时定位与语义建图研究双目视觉惯性融合技术在机器人导航和环境感知中发挥着重要作用。本文以双目视觉惯性融合的同时定位与语义建图为研究主题,对其原理、优点以及应用进行综述。首先介绍了双目视觉惯性融合技术的基本原理和相关工作,然后讨论了同时定位与语义建图在机器人导航和环境感知中的重要性。最后,通过实验结果验证了该技术的有效性和实用性。一、双目视觉惯性融合的基本原理和相关工作双目视觉惯性融合技术是指将双目相机和惯性测量单元(IMU)的数据进行融合,并通过算法进行同时定位和建图的一种技术。双目相机
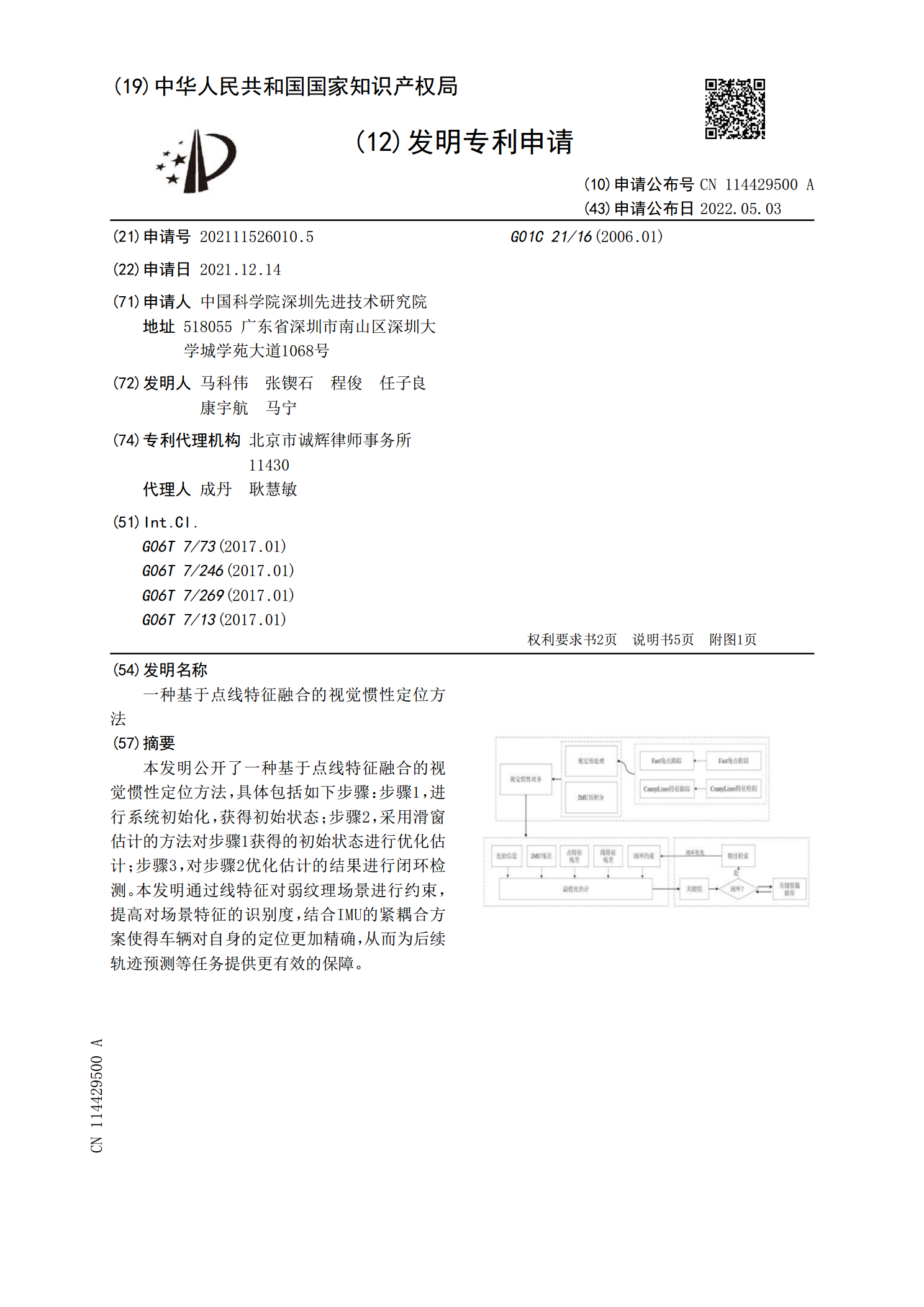
一种基于点线特征融合的视觉惯性定位方法.pdf
本发明公开了一种基于点线特征融合的视觉惯性定位方法,具体包括如下步骤:步骤1,进行系统初始化,获得初始状态;步骤2,采用滑窗估计的方法对步骤1获得的初始状态进行优化估计;步骤3,对步骤2优化估计的结果进行闭环检测。本发明通过线特征对弱纹理场景进行约束,提高对场景特征的识别度,结合IMU的紧耦合方案使得车辆对自身的定位更加精确,从而为后续轨迹预测等任务提供更有效的保障。