
面向室内SLAM的视觉惯性融合定位方法及系统.pdf

书生****aa


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

面向室内SLAM的视觉惯性融合定位方法及系统.pdf
本发明涉及人工智能技术领域,提供一种面向室内SLAM的视觉惯性融合定位方法及系统,双目鱼眼摄像头获取视频图像数据,通过视频图像数据相邻帧之间的I‑LK光流法特征追踪,IMU采集位置和姿态数据,进行预积分处理;将多源数据进行松耦合后融合确定系统初始化参数值,由关键帧策略确定关键帧数据;关键帧数据通过视觉位姿初始化和IMU预积分对齐;外参在线标定、视觉惯性初始化和紧耦合非线性优化,由基于关键帧的滑动窗口构建移动机器人六自由度位姿,已知当前帧相机的位置,通过IMU信息可以预测场景的空间特征点在下一帧图像的位置,

面向动作捕捉和定位的视觉惯性融合技术研究.docx
面向动作捕捉和定位的视觉惯性融合技术研究标题:面向动作捕捉和定位的视觉惯性融合技术研究摘要:随着虚拟现实和增强现实的迅速发展,动作捕捉和定位已成为许多交互应用的重要技术。本论文旨在研究面向动作捕捉和定位的视觉惯性融合技术。首先,回顾了动作捕捉、定位和视觉惯性融合的基本概念和现有研究。然后,分析了视觉惯性融合在动作捕捉和定位中的应用和优势。接着,介绍了机器视觉和惯性测量单元(IMU)等相关技术。最后,针对不同应用场景,讨论了视觉惯性融合技术的挑战和未来研究方向。关键词:动作捕捉、定位、视觉惯性融合、机器视觉
一种单目视觉和GNSS融合的SLAM定位方法及系统.pdf
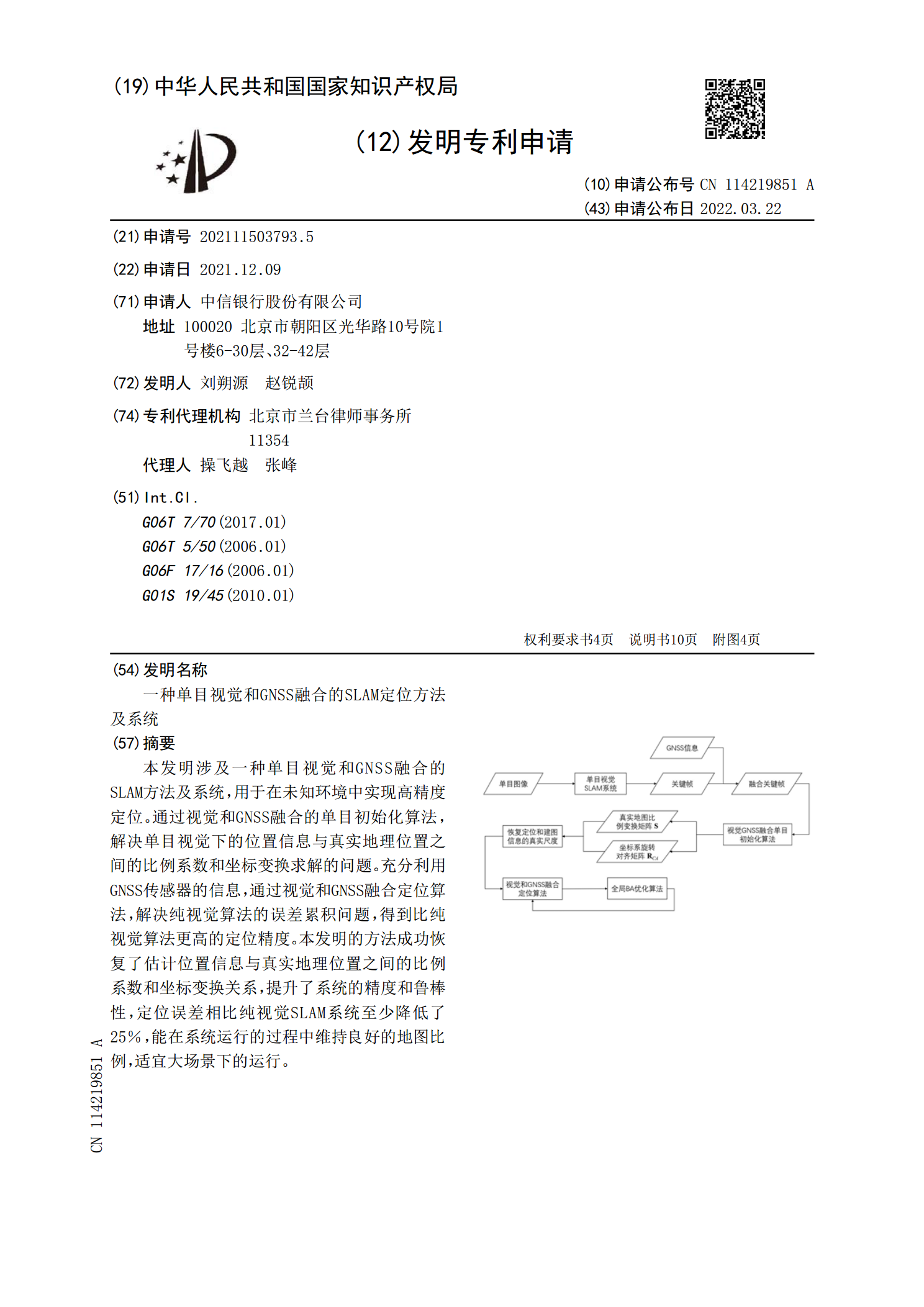
本发明涉及一种单目视觉和GNSS融合的SLAM方法及系统,用于在未知环境中实现高精度定位。通过视觉和GNSS融合的单目初始化算法,解决单目视觉下的位置信息与真实地理位置之间的比例系数和坐标变换求解的问题。充分利用GNSS传感器的信息,通过视觉和GNSS融合定位算法,解决纯视觉算法的误差累积问题,得到比纯视觉算法更高的定位精度。本发明的方法成功恢复了估计位置信息与真实地理位置之间的比例系数和坐标变换关系,提升了系统的精度和鲁棒性,定位误差相比纯视觉SLAM系统至少降低了25%,能在系统运行的过程中维持良好的

基于惯性磁力传感器与单目视觉融合的SLAM方法.docx
基于惯性磁力传感器与单目视觉融合的SLAM方法标题:基于惯性磁力传感器与单目视觉融合的SLAM方法摘要:随着无人系统和增强现实等技术的快速发展,同时也对实时定位和地图构建(SLAM)技术提出了更高的要求。目前,传统的SLAM方法主要依赖于惯性测量单元(IMU)或单目视觉,但它们都存在一些局限性。本文提出了一种基于惯性磁力传感器与单目视觉融合的SLAM方法,该方法能够克服传统方法的局限性,并实现高精度的实时定位和地图构建。关键词:惯性磁力传感器;单目视觉;融合;SLAM;实时定位和地图构建1.引言在无人系统

基于视觉与惯性相融合的SLAM算法研究与应用.docx
基于视觉与惯性相融合的SLAM算法研究与应用基于视觉与惯性相融合的SLAM算法研究与应用摘要:随着无人系统技术的快速发展和应用的广泛推广,同时SLAM(SimultaneousLocalizationandMapping)算法作为无人系统的核心技术之一也受到了越来越多的关注与研究。本文以基于视觉与惯性相融合的SLAM算法为研究重点,探讨了其原理和实现方法,并介绍了其在无人系统领域的应用情况。通过对比实验结果,验证了该算法的有效性和准确性,为无人系统的精确定位和地图构建提供了有力的支持。关键词:SLAM算法