
电力机器人的自主导航与视觉辅助定位融合方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

电力机器人的自主导航与视觉辅助定位融合方法.docx
电力机器人的自主导航与视觉辅助定位融合方法标题:电力机器人的自主导航与视觉辅助定位融合方法摘要:随着电力工业的不断发展,电力机器人被广泛应用于电力巡检、维护和故障排除等工作中。电力机器人的自主导航和视觉辅助定位是实现高效、精确、安全操作的核心技术之一。本文针对电力机器人的自主导航和视觉辅助定位问题,提出了一种融合方法,通过对机器人感知、定位和导航能力的提升,实现了对电力设施的精准定位和自主导航。关键词:电力机器人,自主导航,视觉辅助定位,融合方法1.引言电力机器人作为电力工业的重要装备之一,能够在高温、高
超宽带与视觉融合的室内机器人定位与自主导航方法.pdf
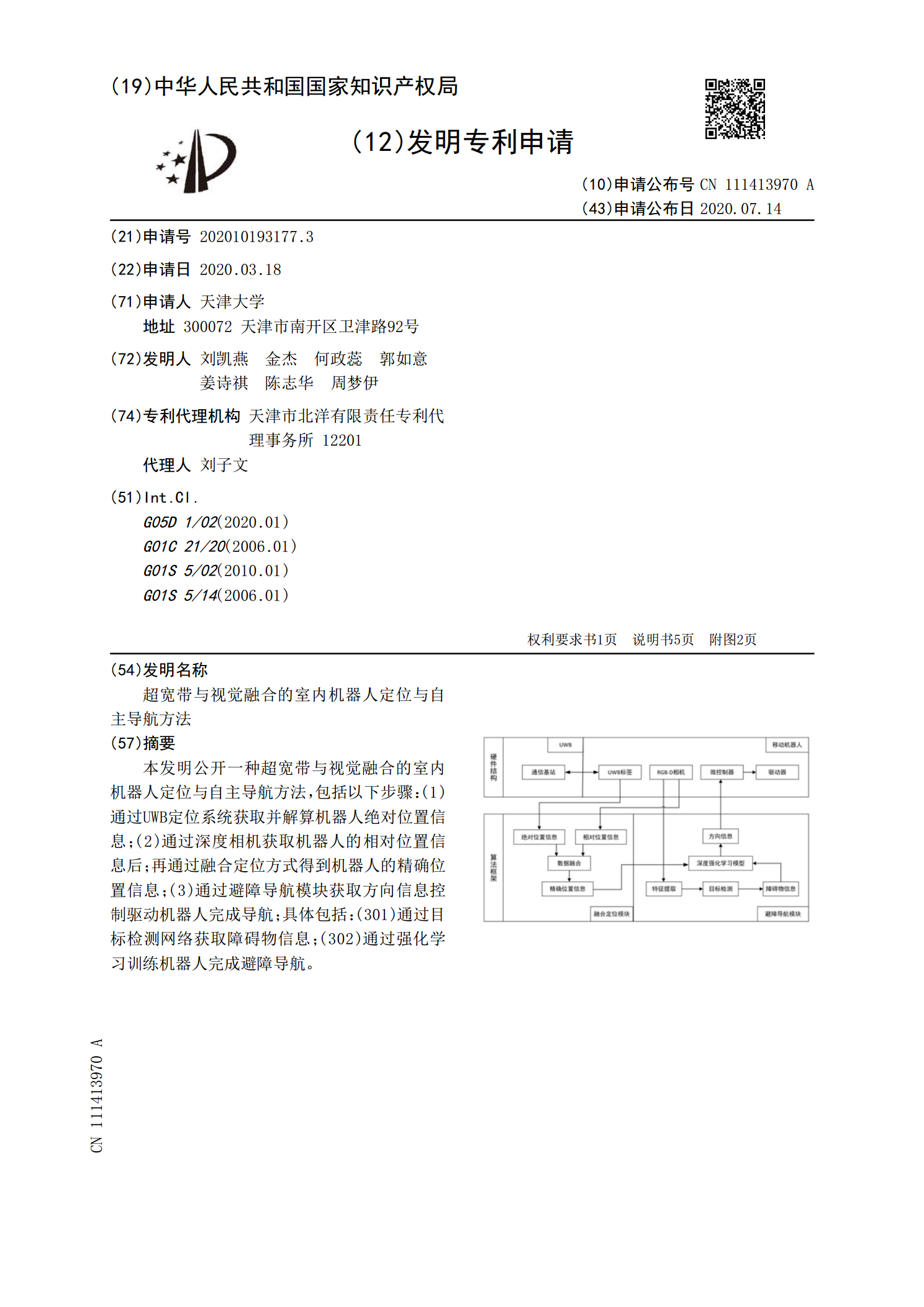
本发明公开一种超宽带与视觉融合的室内机器人定位与自主导航方法,包括以下步骤:(1)通过UWB定位系统获取并解算机器人绝对位置信息;(2)通过深度相机获取机器人的相对位置信息后;再通过融合定位方式得到机器人的精确位置信息;(3)通过避障导航模块获取方向信息控制驱动机器人完成导航;具体包括:(301)通过目标检测网络获取障碍物信息;(302)通过强化学习训练机器人完成避障导航。

融合视觉与惯性导航的机器人自主定位的任务书.docx
融合视觉与惯性导航的机器人自主定位的任务书任务书:融合视觉与惯性导航的机器人自主定位背景在机器人的使用场景中,自主定位是一个至关重要的问题。机器人需要知道自己在什么地方,并在其活动范围内自由移动。传统的机器人定位方法包括GPS定位、激光扫描仪定位等,这些方法在某些特定的场景下能够提供准确的定位结果。但是,在室内和复杂环境下,这些方法往往无法提供有效的解决方案。因此,融合视觉与惯性导航成为自主定位的一种主要方法。任务描述本任务要求实现一种基于融合视觉与惯性导航的机器人自主定位算法,能够实现在室内环境下的定位

煤矿巷道机器人管线视觉辅助定位与导航方法研究.docx
煤矿巷道机器人管线视觉辅助定位与导航方法研究煤矿是我国能源产业的重要组成部分,巷道机器人在煤矿开采中扮演着至关重要的角色。煤矿巷道机器人的管线视觉辅助定位和导航方法对煤矿巷道机器人的安全和可靠性具有重要的影响。本文将对煤矿巷道机器人管线视觉辅助定位和导航方法进行研究和探讨。一、综述随着我国煤矿矿井的深入开采,煤层开采面积的扩大以及煤矿巷道的不断加深和扩展,煤矿巷道机器人的使用日益广泛。为了有效避免煤矿巷道机器人在巷道内的碰撞和意外事故发生,需要对煤矿巷道机器人定位和导航进行精细化管理和控制。传统的煤矿巷道

基于视觉的自主定位机器人.pdf
本发明公开了基于视觉的自主定位机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该自主定位机器人克服现有技术中的机器人使用GPS定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用的问题。