
基于视觉的自主定位机器人.pdf

论文****可爱

1/7

2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于视觉的自主定位机器人.pdf
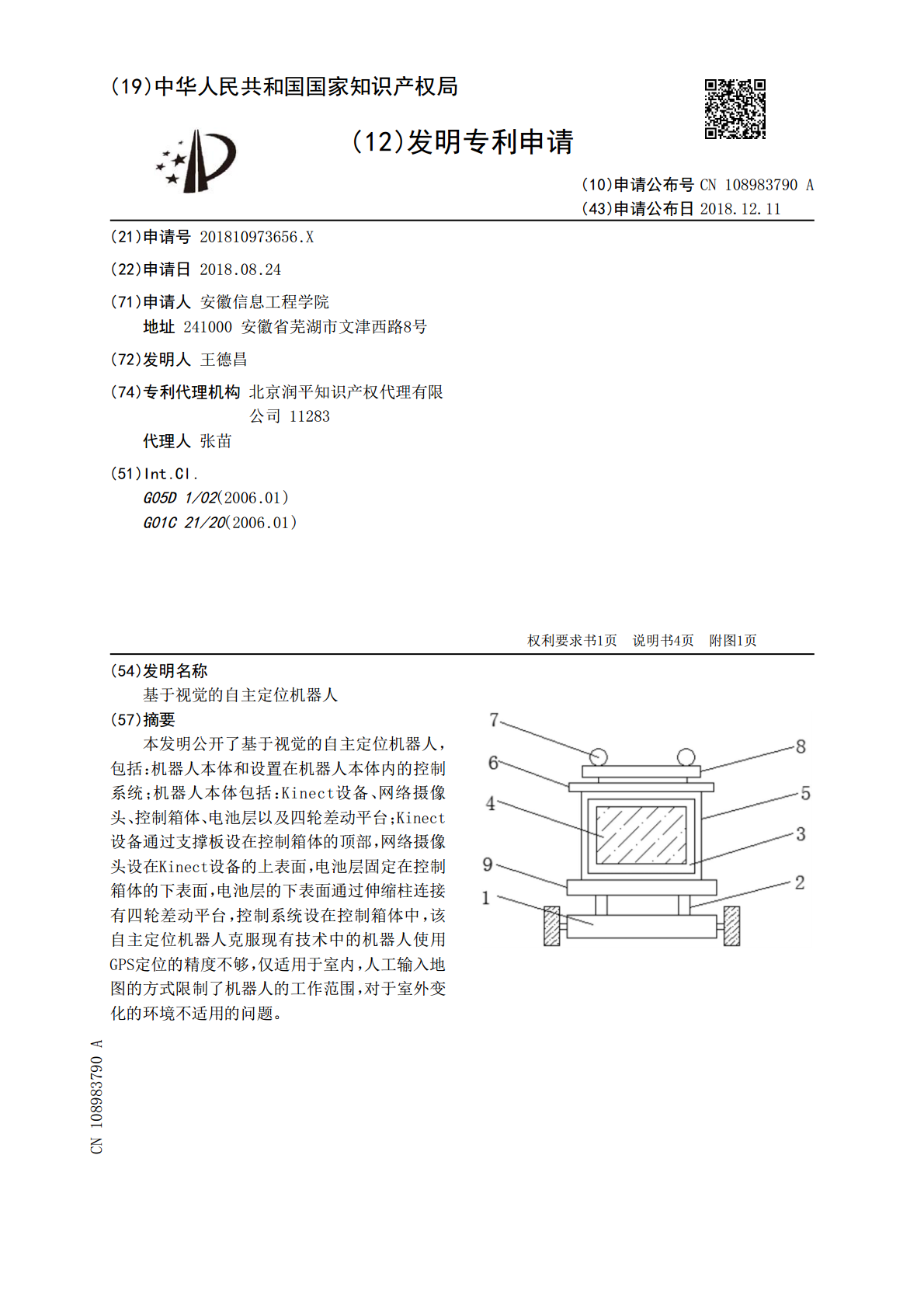
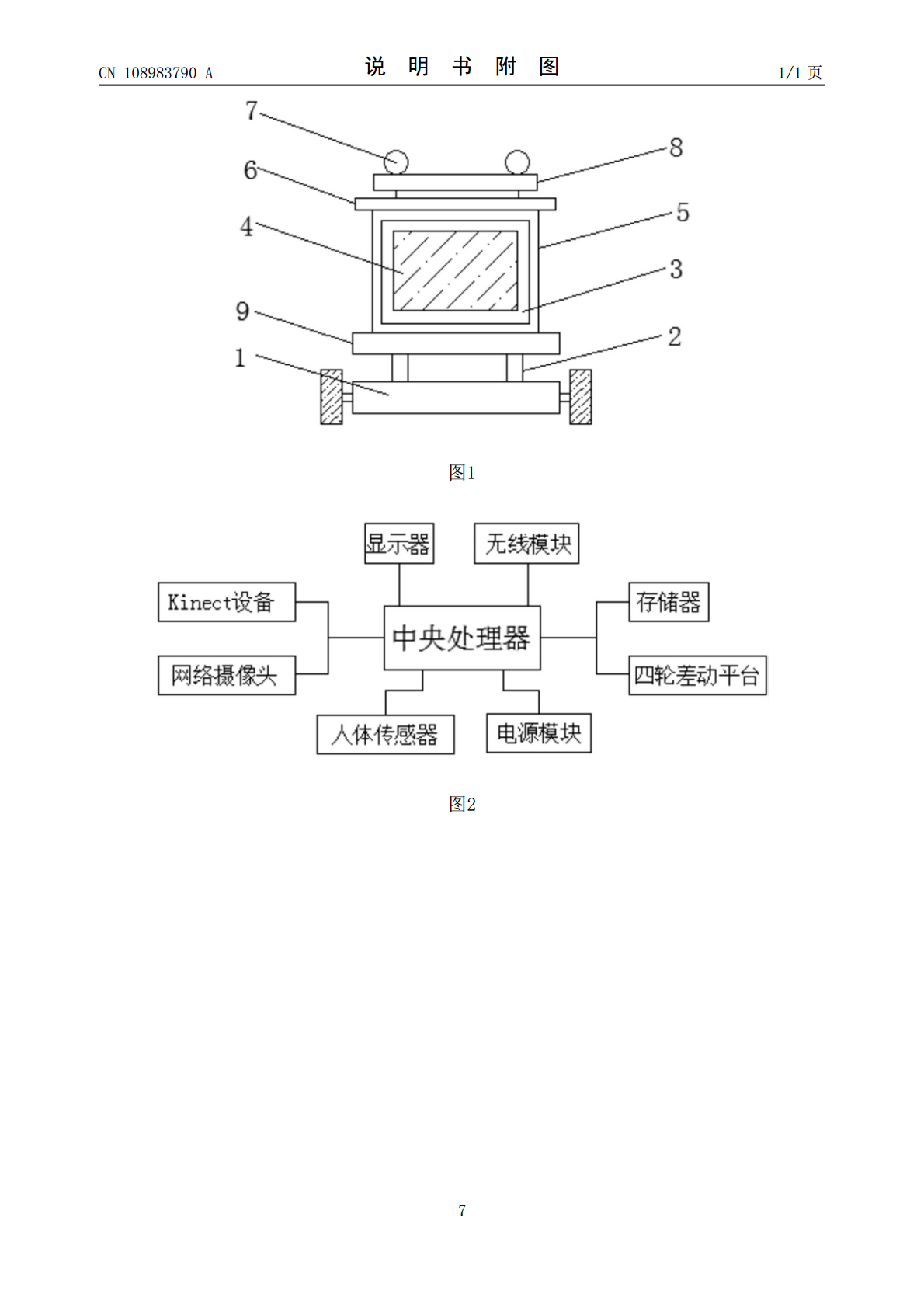
本发明公开了基于视觉的自主定位机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;Kinect设备通过支撑板设在控制箱体的顶部,网络摄像头设在Kinect设备的上表面,电池层固定在控制箱体的下表面,电池层的下表面通过伸缩柱连接有四轮差动平台,控制系统设在控制箱体中,该自主定位机器人克服现有技术中的机器人使用GPS定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,对于室外变化的环境不适用的问题。

机器人基于视觉特征未知环境建模及自主定位.docx
机器人基于视觉特征未知环境建模及自主定位机器人基于视觉特征的未知环境建模及自主定位摘要:随着机器人技术的快速发展,机器人在未知环境中进行建模和自主定位成为了研究的热点领域。本文介绍了机器人基于视觉特征的未知环境建模及自主定位的相关研究。首先,我们概述了机器人建模与定位的基本概念和目标。然后,介绍了机器人基于视觉特征的建模方法,包括立体视觉和单目视觉。最后,介绍了机器人基于视觉特征的自主定位方法,包括特征匹配和视觉里程计。本文总结了当前研究的进展和挑战,并展望了未来的发展方向。关键词:机器人、建模、定位、视

基于视觉SLAM的室内机器人自主定位方法研究的开题报告.docx
基于视觉SLAM的室内机器人自主定位方法研究的开题报告一、选题背景室内机器人是一类具有自主导航能力的智能机器人,其能够感知环境、计划路径并执行任务等。其中,机器人的自主导航是其最为关键的功能。而机器人的自主导航离不开定位技术,因此,如何提高机器人的定位精度是室内机器人研究的热点问题。目前,机器人的定位方法主要包括传统的激光SLAM和视觉SLAM两种。视觉SLAM是一种透过照相机观测环境,并利用视觉数据完成同时定位与建图(SimultaneousLocalizationandMapping,SLAM)的技术

机器人基于视觉特征未知环境建模及自主定位的任务书.docx
机器人基于视觉特征未知环境建模及自主定位的任务书一、任务目标本任务要求设计一种能够基于视觉特征对未知环境进行建模并进行自主定位的机器人系统,使其能够自主地探索并建立环境地图,并在不断的移动过程中能够进行位置的实时跟踪和定位。二、任务背景未知环境建模与自主定位是机器人技术中的核心问题之一,对于智能机器人在未知环境的自主探索、定位和移动路径规划等方面具有重要意义。传统的机器人系统大多使用激光雷达进行建图和定位,但不具备视觉感知的机器人系统更具灵活性和稳健性,即使在纹理较少或光照变化较大的场景中也能正确的完成任
基于Kinect的自主定位机器人.pdf
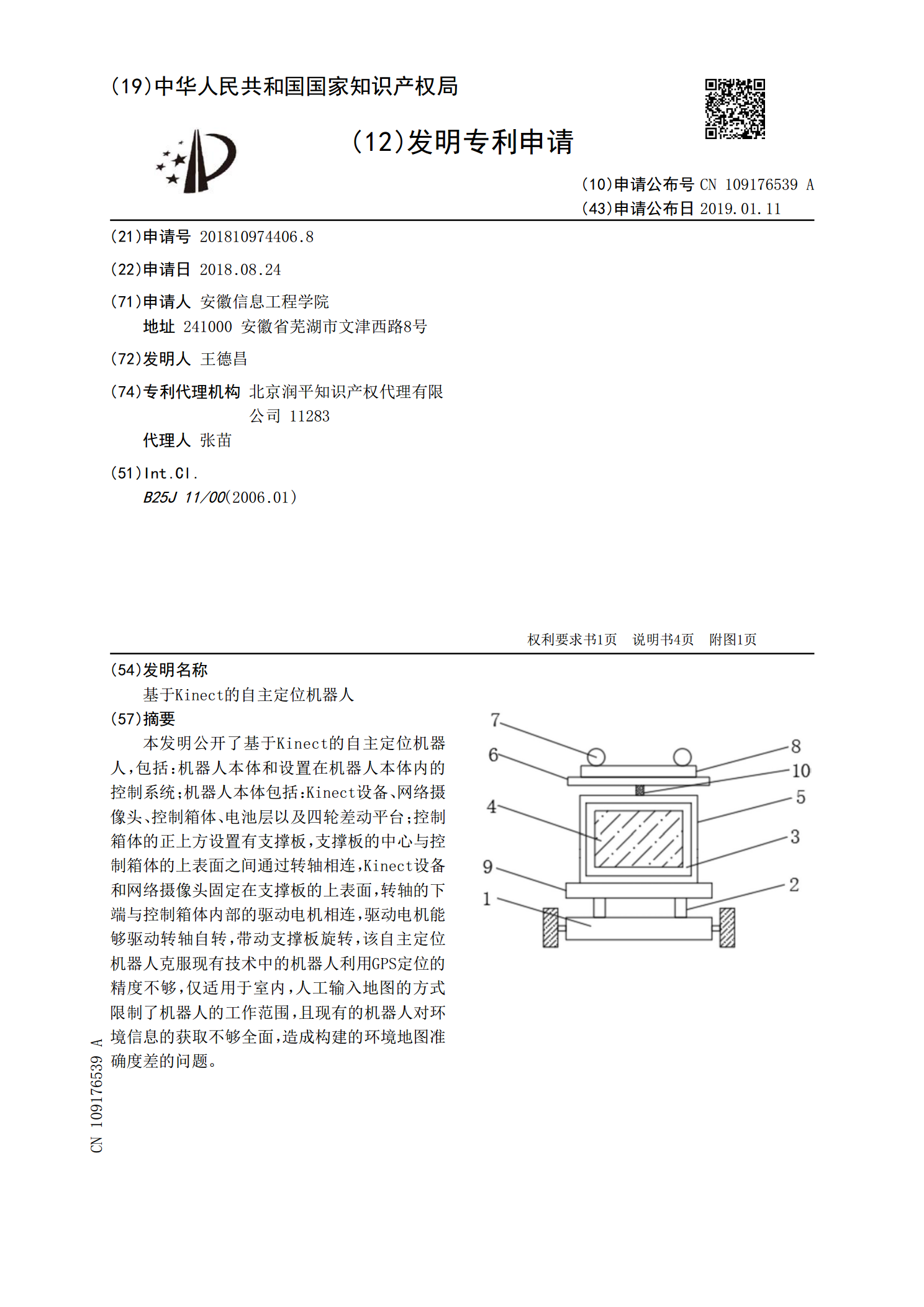
本发明公开了基于Kinect的自主定位机器人,包括:机器人本体和设置在机器人本体内的控制系统;机器人本体包括:Kinect设备、网络摄像头、控制箱体、电池层以及四轮差动平台;控制箱体的正上方设置有支撑板,支撑板的中心与控制箱体的上表面之间通过转轴相连,Kinect设备和网络摄像头固定在支撑板的上表面,转轴的下端与控制箱体内部的驱动电机相连,驱动电机能够驱动转轴自转,带动支撑板旋转,该自主定位机器人克服现有技术中的机器人利用GPS定位的精度不够,仅适用于室内,人工输入地图的方式限制了机器人的工作范围,且现有