
海底犁式挖沟机控制系统研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

海底犁式挖沟机控制系统研究的任务书.docx
海底犁式挖沟机控制系统研究的任务书任务书:海底犁式挖沟机控制系统研究一、课题背景海底犁式挖沟机是一种用于在海底进行沟槽开挖的专用机械设备。它具有高效、精确、可控等特点,在海洋工程、油气开采等领域有广泛的应用前景。然而,目前海底犁式挖沟机的控制系统存在着一些问题,如精度低、适应性差等,需要进行深入的研究和改进。二、研究目标本课题旨在对海底犁式挖沟机的控制系统进行研究,提高其工作精度和适应性,实现更高效、更稳定的海底沟槽开挖。具体目标包括:1.研究目前海底犁式挖沟机控制系统的工作原理和结构,分析存在的问题和不

海底犁式挖沟机控制系统研究的中期报告.docx
海底犁式挖沟机控制系统研究的中期报告本研究的目标是设计一个高效的控制系统,用于控制海底犁式挖沟机的运动,并实现精确的挖沟操作。在中期报告中,我们主要研究了以下几个方面。首先,我们分析了海底犁式挖沟机的运动特点和挖沟原理,以及现有的控制系统。我们发现现有的控制系统主要是基于电气控制系统的,缺乏对机器运动状态和环境变化的实时感知和调节。为了解决这一问题,我们提出了一个基于传感器数据和机器学习的控制系统方案。具体地,我们将安装多个传感器,包括惯性传感器、声音传感器、视觉传感器等,以获取机器的姿态、速度、环境参数
海底犁式挖沟机.pdf
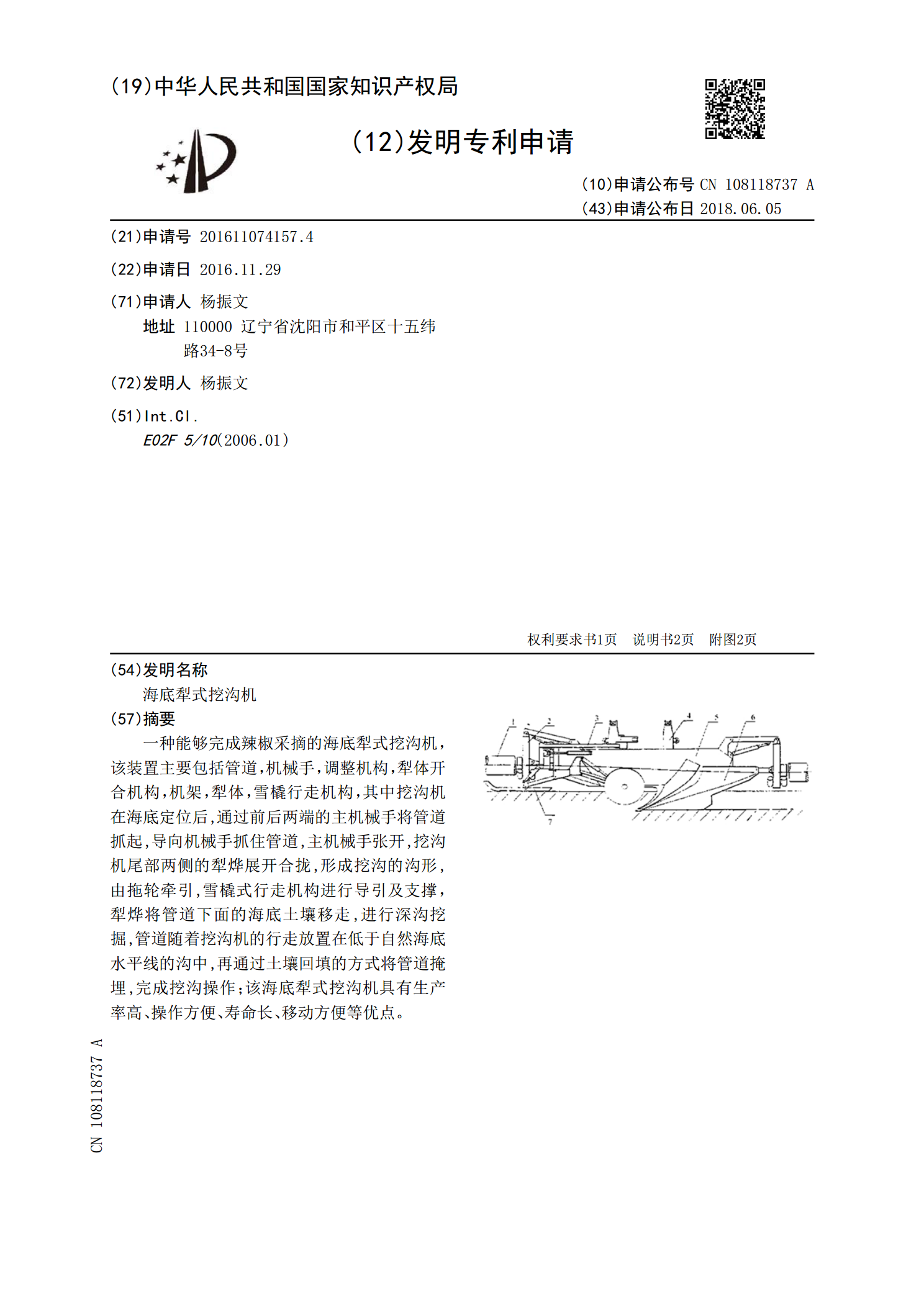
一种能够完成辣椒采摘的海底犁式挖沟机,该装置主要包括管道,机械手,调整机构,犁体开合机构,机架,犁体,雪橇行走机构,其中挖沟机在海底定位后,通过前后两端的主机械手将管道抓起,导向机械手抓住管道,主机械手张开,挖沟机尾部两侧的犁烨展开合拢,形成挖沟的沟形,由拖轮牵引,雪橇式行走机构进行导引及支撑,犁烨将管道下面的海底土壤移走,进行深沟挖掘,管道随着挖沟机的行走放置在低于自然海底水平线的沟中,再通过土壤回填的方式将管道掩埋,完成挖沟操作;该海底犁式挖沟机具有生产率高、操作方便、寿命长、移动方便等优点。

海底犁式挖沟机犁体曲面优化设计(英文).docx
海底犁式挖沟机犁体曲面优化设计(英文)Title:DesignOptimizationofUnderwaterPlow-typeTrencherPloughBodyAbstract:Underwaterplow-typetrenchersareessentialequipmentusedfortheconstructionofunderwaterpipelinesandcablenetworks.Theefficiencyandperformanceofthesemachinesgreatlydepend

海底犁式挖沟机吊接装置与抱管组件研究的任务书.docx
海底犁式挖沟机吊接装置与抱管组件研究的任务书任务书课题名称:海底犁式挖沟机吊接装置与抱管组件研究一、研究背景与目的在近年来的海洋资源开发中,随着海洋油气、海底电缆、海底水管的需求越来越大,海底犁式挖沟机逐渐成为了海底管道敷设的重要工具。而海底犁式挖沟机的效率、安全性、可靠性直接关系到海底管道的敷设质量和效益。因此,海底犁式挖沟机的配套装置的研究具有重要的意义。针对目前市场上存在的海底犁式挖沟机吊接装置和抱管组件不够完善、不够智能化的问题,本研究希望通过对吊接装置和抱管组件的研究,提高其智能化水平、完善其功