
海底犁式挖沟机控制系统研究的中期报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

海底犁式挖沟机控制系统研究的中期报告.docx
海底犁式挖沟机控制系统研究的中期报告本研究的目标是设计一个高效的控制系统,用于控制海底犁式挖沟机的运动,并实现精确的挖沟操作。在中期报告中,我们主要研究了以下几个方面。首先,我们分析了海底犁式挖沟机的运动特点和挖沟原理,以及现有的控制系统。我们发现现有的控制系统主要是基于电气控制系统的,缺乏对机器运动状态和环境变化的实时感知和调节。为了解决这一问题,我们提出了一个基于传感器数据和机器学习的控制系统方案。具体地,我们将安装多个传感器,包括惯性传感器、声音传感器、视觉传感器等,以获取机器的姿态、速度、环境参数
海底犁式挖沟机.pdf
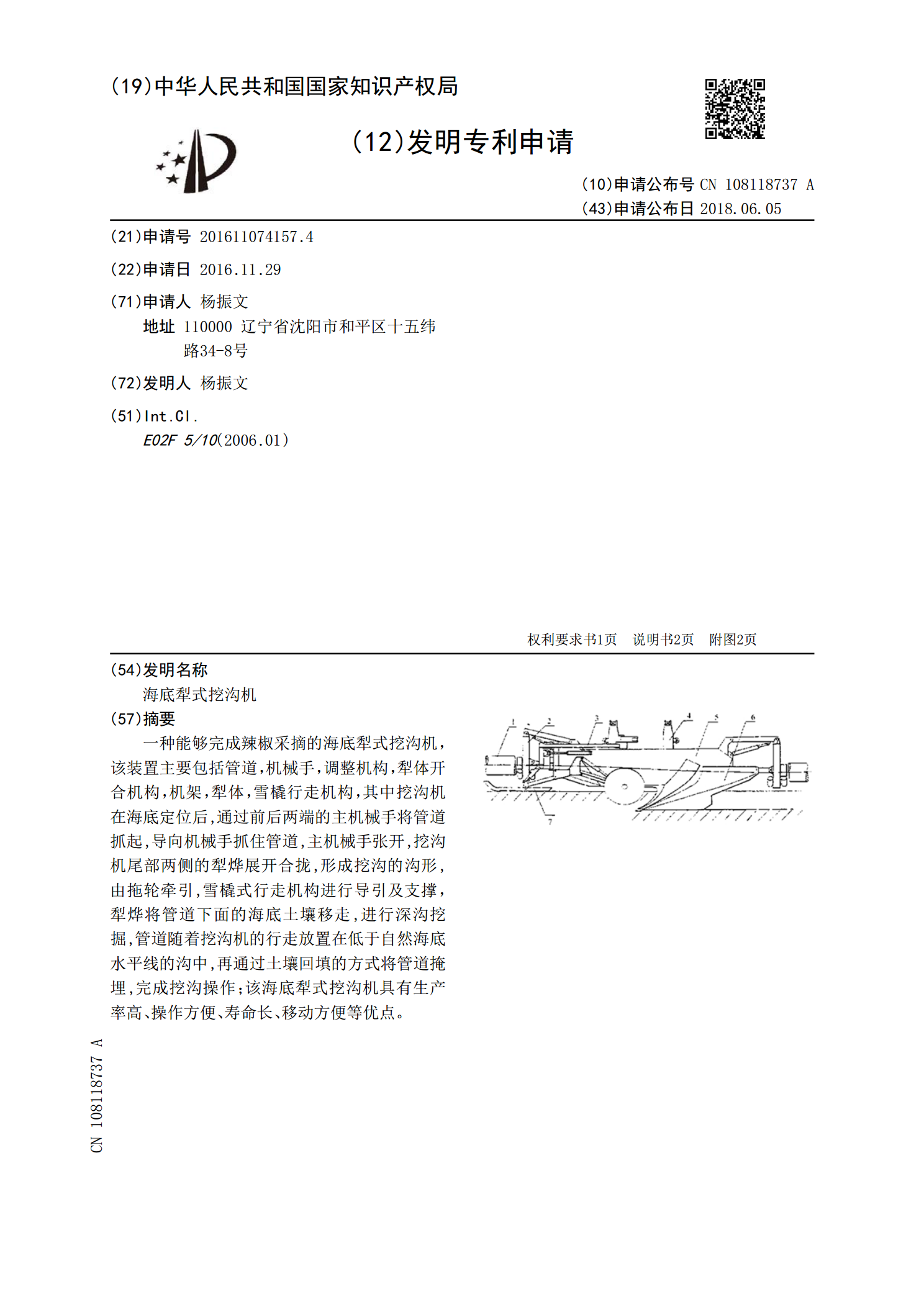
一种能够完成辣椒采摘的海底犁式挖沟机,该装置主要包括管道,机械手,调整机构,犁体开合机构,机架,犁体,雪橇行走机构,其中挖沟机在海底定位后,通过前后两端的主机械手将管道抓起,导向机械手抓住管道,主机械手张开,挖沟机尾部两侧的犁烨展开合拢,形成挖沟的沟形,由拖轮牵引,雪橇式行走机构进行导引及支撑,犁烨将管道下面的海底土壤移走,进行深沟挖掘,管道随着挖沟机的行走放置在低于自然海底水平线的沟中,再通过土壤回填的方式将管道掩埋,完成挖沟操作;该海底犁式挖沟机具有生产率高、操作方便、寿命长、移动方便等优点。

海底犁式挖沟机控制系统研究的任务书.docx
海底犁式挖沟机控制系统研究的任务书任务书:海底犁式挖沟机控制系统研究一、课题背景海底犁式挖沟机是一种用于在海底进行沟槽开挖的专用机械设备。它具有高效、精确、可控等特点,在海洋工程、油气开采等领域有广泛的应用前景。然而,目前海底犁式挖沟机的控制系统存在着一些问题,如精度低、适应性差等,需要进行深入的研究和改进。二、研究目标本课题旨在对海底犁式挖沟机的控制系统进行研究,提高其工作精度和适应性,实现更高效、更稳定的海底沟槽开挖。具体目标包括:1.研究目前海底犁式挖沟机控制系统的工作原理和结构,分析存在的问题和不

海底犁式挖沟机犁体曲面优化设计(英文).docx
海底犁式挖沟机犁体曲面优化设计(英文)Title:DesignOptimizationofUnderwaterPlow-typeTrencherPloughBodyAbstract:Underwaterplow-typetrenchersareessentialequipmentusedfortheconstructionofunderwaterpipelinesandcablenetworks.Theefficiencyandperformanceofthesemachinesgreatlydepend

复杂地貌下海底犁式挖沟机动力学仿真分析.docx
复杂地貌下海底犁式挖沟机动力学仿真分析标题:复杂地貌下海底犁式挖沟机动力学仿真分析摘要:海底犁式挖沟机在海洋油气勘探和开采过程中起着重要的作用。然而,复杂的海底地貌条件对于机器的动力学性能提出了挑战。本论文利用计算机仿真软件,对海底犁式挖沟机在复杂地貌下的动力学特性进行了研究。通过详细的模型建立和参数设置,并针对不同地貌条件进行了仿真分析,以评估机器的性能和效果。研究结果表明,海底犁式挖沟机在复杂地貌下的稳定性和效率都受到一定程度的影响。本研究为改进海底犁式挖沟机的设计和操作提供了参考,对于海底油气开采的