
形貌约束的多视角点云分阶配准方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

形貌约束的多视角点云分阶配准方法.docx
形貌约束的多视角点云分阶配准方法标题:形貌约束的多视角点云分阶配准方法摘要:多视角点云分阶配准是计算机视觉和图像处理领域的重要问题之一,它在三维建模、虚拟现实和增强现实等应用中具有广泛的应用。本文提出了一种基于形貌约束的多视角点云分阶配准方法,旨在提高配准的准确性和稳定性。通过综合利用多视角点云的形状信息,以及点云之间的约束关系,我们的方法能够有效地消除噪声和误差,得到更精确的点云配准结果。关键词:多视角点云、形貌约束、配准、三维建模、增强现实1.引言多视角点云是通过不同视角下的激光扫描或摄像机采集得到的
基于非线性优化的多视角点云配准方法及系统.pdf
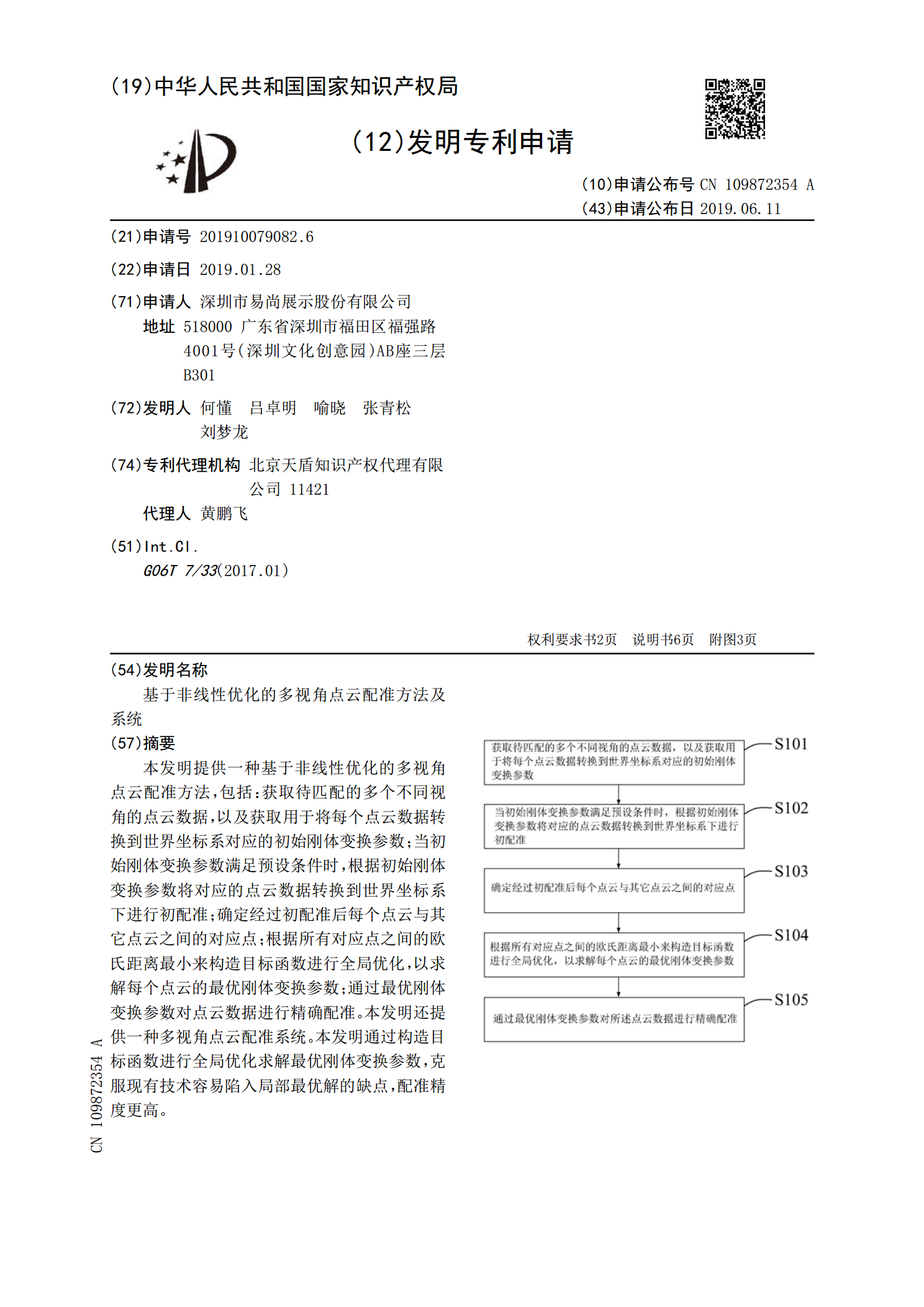
本发明提供一种基于非线性优化的多视角点云配准方法,包括:获取待匹配的多个不同视角的点云数据,以及获取用于将每个点云数据转换到世界坐标系对应的初始刚体变换参数;当初始刚体变换参数满足预设条件时,根据初始刚体变换参数将对应的点云数据转换到世界坐标系下进行初配准;确定经过初配准后每个点云与其它点云之间的对应点;根据所有对应点之间的欧氏距离最小来构造目标函数进行全局优化,以求解每个点云的最优刚体变换参数;通过最优刚体变换参数对点云数据进行精确配准。本发明还提供一种多视角点云配准系统。本发明通过构造目标函数进行全局

序列图像约束的点云初始配准方法.docx
序列图像约束的点云初始配准方法标题:点云初始配准方法中基于序列图像约束的研究摘要:初始配准是点云处理中的重要步骤之一,它的精度和鲁棒性对于后续的点云处理效果具有决定性的影响。本文针对点云初始配准过程中存在的问题,提出一种基于序列图像约束的初始配准方法。通过序列图像的约束,结合点云特征匹配和优化算法,实现点云的准确初始化,进而提高后续点云处理的效果。关键词:初始配准,点云,序列图像,约束,特征匹配,优化算法1、引言点云配准是点云处理中的重要步骤之一,主要目的是将多个离散的点云数据集合并为一个完整的点云模型。

基于位姿参数估计的多视角点云配准方法.docx
基于位姿参数估计的多视角点云配准方法1.内容概要本文提出了一种基于位姿参数估计的多视角点云配准方法,旨在解决多视角图像在三维重建过程中可能出现的位姿一致性问题。该方法首先根据输入的多视角点云数据和相机标定信息,估计出每个相机的位姿参数。通过最小二乘法计算各个相机之间的位姿误差,并利用RANSAC算法去除异常值。根据得到的位姿参数对点云数据进行配准,从而实现多视角点云数据的融合。实验结果表明,该方法在处理具有不同姿态和尺度的多视角点云数据时具有较好的性能。1.1研究背景随着计算机视觉、机器人技术和虚拟现实等

基于元组约束的多视角Lidar点云配准技术的研究的任务书.docx
基于元组约束的多视角Lidar点云配准技术的研究的任务书任务书1.背景介绍随着无人驾驶、智能交通等领域的快速发展,点云配准技术在三维重建、目标识别、环境感知等方面的应用越来越广泛。而现有的点云配准方法仍然存在一些问题,比如需要先验知识、对点云密度和采样率要求较高、对计算资源要求高等。因此,在实际应用中,需要针对不同场景和任务开发更加高效、鲁棒的点云配准算法。2.研究意义本项目旨在研究一种基于元组约束的多视角Lidar点云配准技术,通过在不同视角下对点云进行分割、描述和匹配,实现高精度的点云配准。其研究意义