
小型共轴双旋翼折叠无人直升机平台设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

小型共轴双旋翼折叠无人直升机平台设计.docx
小型共轴双旋翼折叠无人直升机平台设计小型共轴双旋翼折叠无人直升机平台设计摘要:本论文主要针对小型共轴双旋翼折叠无人直升机平台的设计进行研究。首先介绍了无人直升机的背景和应用,然后对共轴双旋翼结构进行了介绍和分析,对折叠机构的原理和设计进行了详细说明。接下来,本文介绍了无人机的飞行控制系统和导航系统,并进行了仿真实验。最后,通过对实验结果的分析和评价,总结了本文的研究成果,并对未来的研究方向进行了展望。关键词:小型无人直升机,共轴双旋翼,折叠机构,飞行控制系统,导航系统1.引言无人直升机是一种不需要人操控的

面向微小型共轴双旋翼无人系统的非线性控制设计的开题报告.docx
面向微小型共轴双旋翼无人系统的非线性控制设计的开题报告一、课题背景无人机已经成为国防、民用和商业领域中重要的应用工具,其中,微小型共轴双旋翼无人系统因其体积小、机动灵活、可用于室内、房间、楼层等狭窄的环境,具有广泛的适用性和实用性,成为近年来研究的热点之一。针对微小型共轴双旋翼无人系统,控制系统设计是其核心和关键,具有重要意义。传统的控制算法对于微小型共轴双旋翼无人系统存在很多限制,如容易受到气流干扰,难以保证稳定性和精度等,因此需要设计新的控制算法来提高其控制性能。本课题旨在针对微小型共轴双旋翼无人系统

双旋翼无人直升机.pdf
本发明涉及旋翼式无人直升机,进一步涉及一种双旋翼无人直升机。本发明的目的在于解决双旋翼无人驾驶直升机在飞行过程中旋翼主轴的同步性问题。本发明的技术方案如下:双旋翼无人直升机,包括:机身、两个交叉的旋翼、旋翼主轴,分别与旋翼主轴相连的主轴齿轮,动力源,所述交叉的旋翼的交叉状态为:当一个旋翼与机身纵向垂直,另一旋翼与机身纵向平行时,两个旋翼正好垂直;还包括:一个同步装置。本发明对于现有技术的优点在于:同步装置为机械式啮合,确保了两幅旋翼旋转的协调性,所以它们工作时不会互相碰撞。
2020222479279双旋翼系统和共轴直升机.pdf
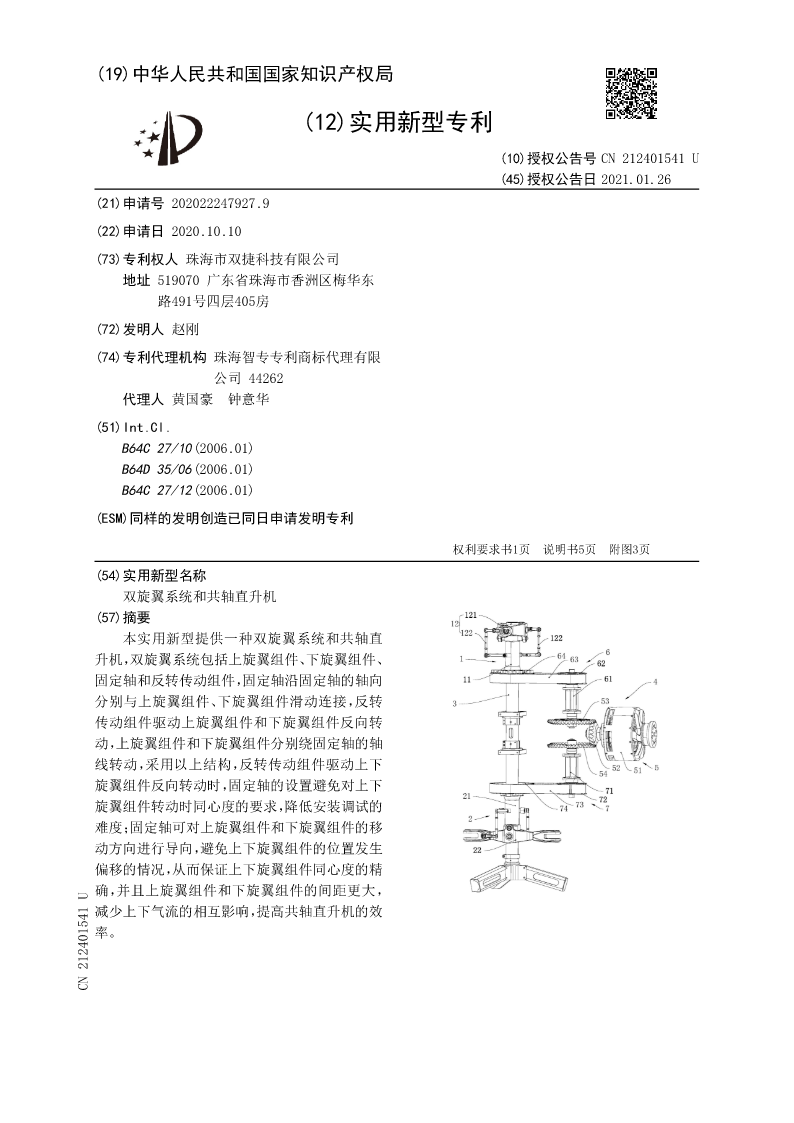
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号CN212401541U(45)授权公告日2021.01.26(21)申请号202022247927.9(22)申请日2020.10.10(73)专利权人珠海市双捷科技有限公司地址519070广东省珠海市香洲区梅华东路491号四层405房(72)发明人赵刚(74)专利代理机构珠海智专专利商标代理有限公司44262代理人黄国豪钟意华(51)Int.Cl.B64C27/10(2006.01)B64D35/06(2006.01)B64C2

小型四旋翼无人直升机控制系统设计.docx
小型四旋翼无人直升机控制系统设计一、引言随着科技的不断进步和无人机应用范围的不断扩大,小型四旋翼无人直升机越来越受到人们的关注。控制系统是小型四旋翼无人直升机的核心,对于无人直升机的稳定飞行和精准控制具有重要意义。本论文将就小型四旋翼无人直升机控制系统的设计进行探讨。二、小型四旋翼无人直升机控制系统的概述小型四旋翼无人直升机的控制系统采用了传感器、控制器、执行器等不同模块来实现飞行姿态控制和飞行轨迹控制。在飞行姿态控制方面,主要包括姿态估计和姿态控制两个部分。姿态估计是通过获取无人机的姿态信息来确定无人机