
GPS测距定位基本原理.ppt

天马****23

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共96页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

GPS测距定位基本原理.ppt
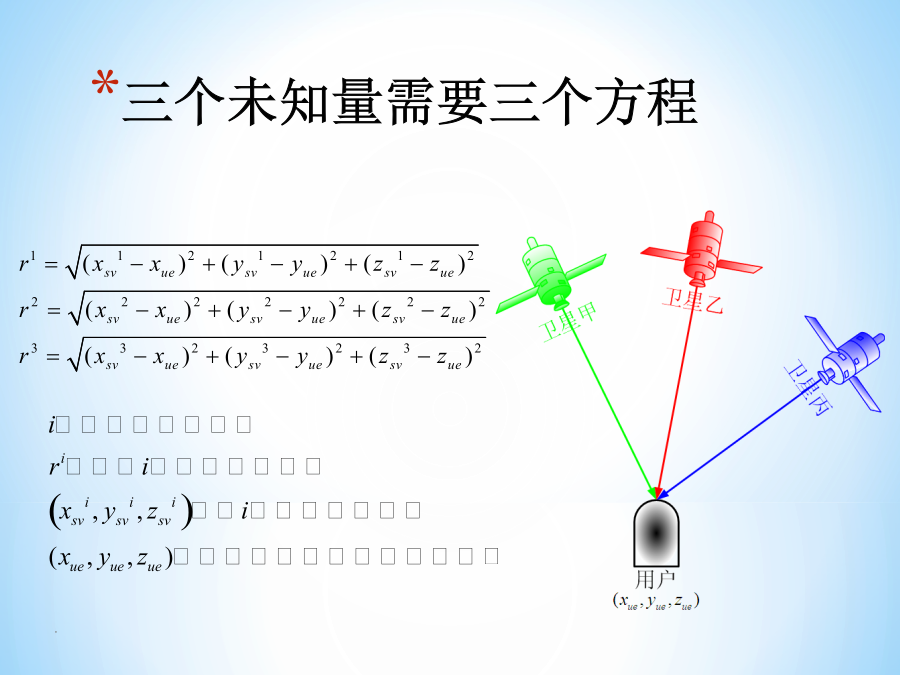
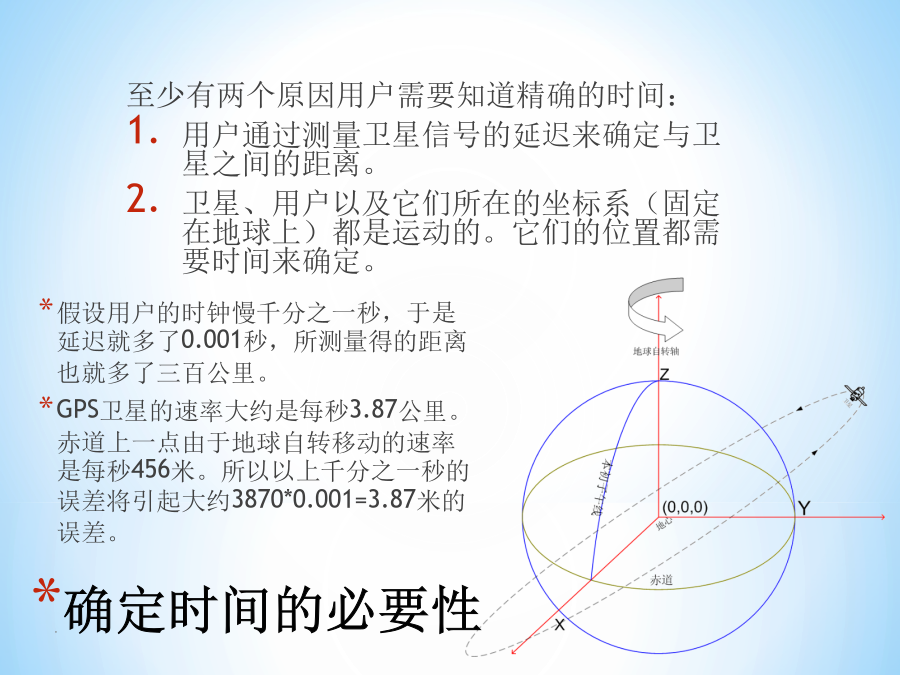
GPS测距定位基本原理GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系

GPS测距定位基本原理.ppt
GPS测距定位基本原理GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系

4.GPS测距定位基本原理教程文件.ppt
4.GPS测距定位基本原理GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系统的实质(关键),是要得到用户(载体)的高精度的瞬时位置。若根据前面在概论中所描述的几何模型,定位过程就是:首先,根据卫星广播的星历,计算出第i颗卫星的准确位置xi,yi,zi;其次,根据测量的码伪距或相位的伪距,计算出用户与第i颗卫星之间的相对距离;最后,根据导航方法计算出用户的三维位置x
测距定位基本原理.pptx
GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系统的实质(关键),是要

GPS定位基本原理.pptx
《GPS原理及其应用》第七讲GPS定位的基本原理GPS测量定位方法分类获得定位结果的时效事后定位实时定位观测值类型伪距测量载波相位测量单点定位相对定位差分GPS§7.1单点定位我在哪里?1、GPS单点定位的概念优点:一台接收机单独定位,观测简单,可瞬时定位缺点:精度主要受系统性偏差的影响,定位精度低应用领域低精度导航、资源普查、军事、...在待测点上设站,向3个或3个以上已知点进行角度观测,通过后方交会方法求出待测点的坐标。2、GPS单点定位的几何原理2、GPS单点定位的几何原理2、GPS单点定位的几何原