
测距定位基本原理.pptx

胜利****实阿

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共128页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
测距定位基本原理.pptx
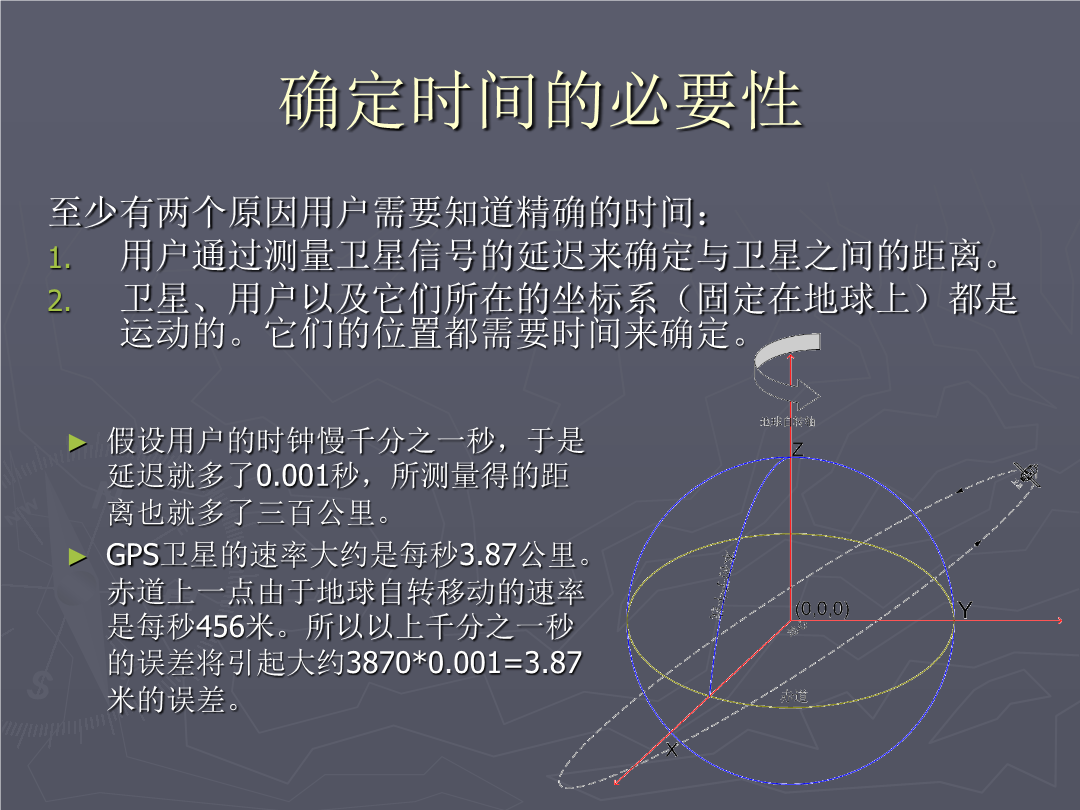
GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系统的实质(关键),是要

GPS测距定位基本原理.ppt
GPS测距定位基本原理GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系

GPS测距定位基本原理.ppt
GPS测距定位基本原理GPS定位的基本原理和过程GPS定位依据的是空间几何三点定位原理。为了消除时差引入的误差,GPS系统技术上采取四星定位。定位除依据星座的几何构图外,还必须有准确的定时。GPS卫星导航系统的定位精度取决于卫星和用户间的几何结构、卫星星历精度、GPS系统时同步精度、测距精度和机内噪声等诸因素的组合。GPS系统的定位步骤:跟踪、选择卫星、接收选定卫星的信号。解读、解算出卫星位置。测量得到卫星和用户之间的相对位置。解算得到用户的最可信赖位置。三个未知量需要三个方程GPS定位的基本原理GPS系

RSSI测距定位与指纹法定位的算法研究.docx
RSSI测距定位与指纹法定位的算法研究本文主要探讨了RSSI测距定位与指纹法定位的算法研究。首先,介绍了RSSI测距定位和指纹法定位的基本概念和原理,然后分别对两种算法进行了详细的分析和比较,最后总结了各自的优缺点和应用场景。一、RSSI测距定位和指纹法定位的基本概念和原理RSSI测距定位是利用收到信号强度指示(RSSI)来估计设备与信号源之间的距离的一种定位算法。其原理是根据信号的传输损耗模型,通过对信号强度的测量和分析,粗略地计算出设备与信号源之间的距离。指纹法定位是利用事先采集的信号数据(指纹),在

RSSI测距定位与指纹法定位的算法研究.pptx
RSSI测距定位与指纹法定位的算法研究目录添加章节标题RSSI测距定位算法测距原理信号衰减模型距离计算方法定位算法优化指纹法定位算法指纹库建立指纹匹配算法定位精度提高方法动态环境适应性算法性能比较定位精度比较环境适应性比较实时性比较复杂度比较算法应用场景室内定位导航人员物资跟踪智能交通管理物联网应用领域算法发展趋势与挑战算法改进方向技术难点与挑战未来发展趋势跨领域融合应用THANKYOU