
外骨骼式上肢康复机器人运动控制的应用研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

外骨骼式上肢康复机器人运动控制的应用研究.docx
外骨骼式上肢康复机器人运动控制的应用研究外骨骼式上肢康复机器人运动控制的应用研究摘要外骨骼式上肢康复机器人已经成为康复领域的重要工具,可以帮助患者进行上肢功能康复训练。本论文旨在研究外骨骼式上肢康复机器人的运动控制方法及其应用。首先,简要介绍了外骨骼式上肢康复机器人的基本结构和工作原理。然后,讨论了传统的运动控制方法以及基于循环神经网络的运动控制方法的优缺点。最后,提出了一个基于深度学习的运动控制方法,并进行了实验验证。研究结果表明,基于深度学习的运动控制方法在外骨骼式上肢康复机器人中具有良好的效果。1.

外骨骼式上肢康复机器人运动控制的应用研究的任务书.docx
外骨骼式上肢康复机器人运动控制的应用研究的任务书一、研究背景随着工业化和现代化的快速发展,人们的生活水平得到了大幅提高,但是也面临许多挑战和问题,其中之一就是人的身体健康问题。随着老龄化人口的不断增加,动作障碍和肢体瘫痪等问题逐渐受到了人们的关注,因此研究和开发外骨骼式上肢康复机器人成为了目前的重要研究领域之一。外骨骼式上肢康复机器人可以帮助肢体瘫痪的患者恢复部分上肢功能,并在日常生活中实现自我照顾和社交活动。这种机器人可以通过运动控制来帮助患者进行康复训练,提高患者的肌肉力量和关节灵活性,从而改善康复效
外骨骼式上肢康复机器人.pdf
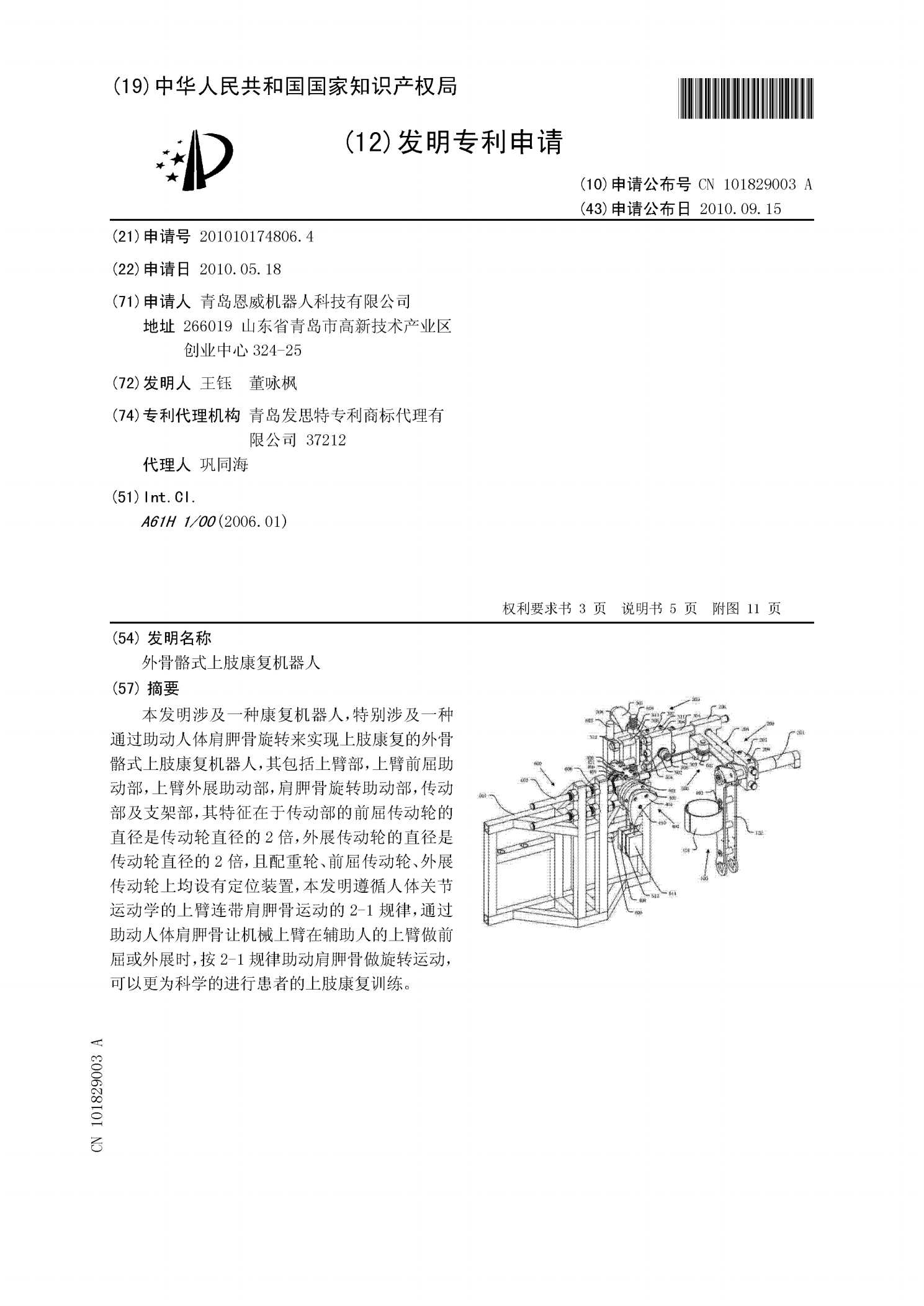
本发明涉及一种康复机器人,特别涉及一种通过助动人体肩胛骨旋转来实现上肢康复的外骨骼式上肢康复机器人,其包括上臂部,上臂前屈助动部,上臂外展助动部,肩胛骨旋转助动部,传动部及支架部,其特征在于传动部的前屈传动轮的直径是传动轮直径的2倍,外展传动轮的直径是传动轮直径的2倍,且配重轮、前屈传动轮、外展传动轮上均设有定位装置,本发明遵循人体关节运动学的上臂连带肩胛骨运动的2-1规律,通过助动人体肩胛骨让机械上臂在辅助人的上臂做前屈或外展时,按2-1规律助动肩胛骨做旋转运动,可以更为科学的进行患者的上肢康复训练。?

上肢康复外骨骼机器人控制方法进展研究.pptx
上肢康复外骨骼机器人控制方法进展研究目录添加目录项标题上肢康复外骨骼机器人概述定义与功能分类与特点应用领域上肢康复外骨骼机器人控制方法研究现状神经网络控制方法模糊逻辑控制方法滑模控制方法鲁棒控制方法上肢康复外骨骼机器人控制方法研究进展新型控制算法研究控制精度与稳定性提升研究人机交互与协同控制研究智能化与自适应控制研究上肢康复外骨骼机器人控制方法面临的挑战与展望挑战分析未来发展方向技术创新与应用前景结论研究成果总结对未来研究的建议与展望感谢观看

上肢外骨骼康复机器人运动控制系统设计的中期报告.docx
上肢外骨骼康复机器人运动控制系统设计的中期报告1.研究背景随着人口老龄化的加剧和机器人技术的快速发展,机器人在康复领域的应用越来越广泛。目前,上肢外骨骼康复机器人已成为康复领域研究的热点之一。上肢外骨骼康复机器人是一种通过外骨骼结构和电机驱动实现肢体康复的设备。它通过对患者手臂的运动轨迹进行监测和分析,按照特定的运动规律进行主动带动,能够帮助患者恢复肌肉力量和关节灵活性,提高肢体的功能。2.研究内容本次研究的主要内容是设计上肢外骨骼康复机器人运动控制系统。该系统可以通过传感器检测患者手臂的运动轨迹,并根据