
基于激光雷达的运动补偿方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光雷达的运动补偿方法.docx
基于激光雷达的运动补偿方法基于激光雷达的运动补偿方法摘要:激光雷达是一种常用的高精度三维感测装置,广泛应用于自动驾驶、机器人导航、环境建模等领域。然而,在实际应用中,激光雷达往往会受到运动补偿的挑战,导致损失精度或出现数据失真。本文提出了一种基于激光雷达的运动补偿方法,可以有效地减小运动补偿对激光雷达数据的影响,提高感测精度和稳定性。关键词:激光雷达;运动补偿;感测精度;稳定性1.引言激光雷达是一种利用激光辐射发射出的光束,通过测量激光束在空间中的反射来获取目标物体的几何形状和距离信息的设备。由于其高精度
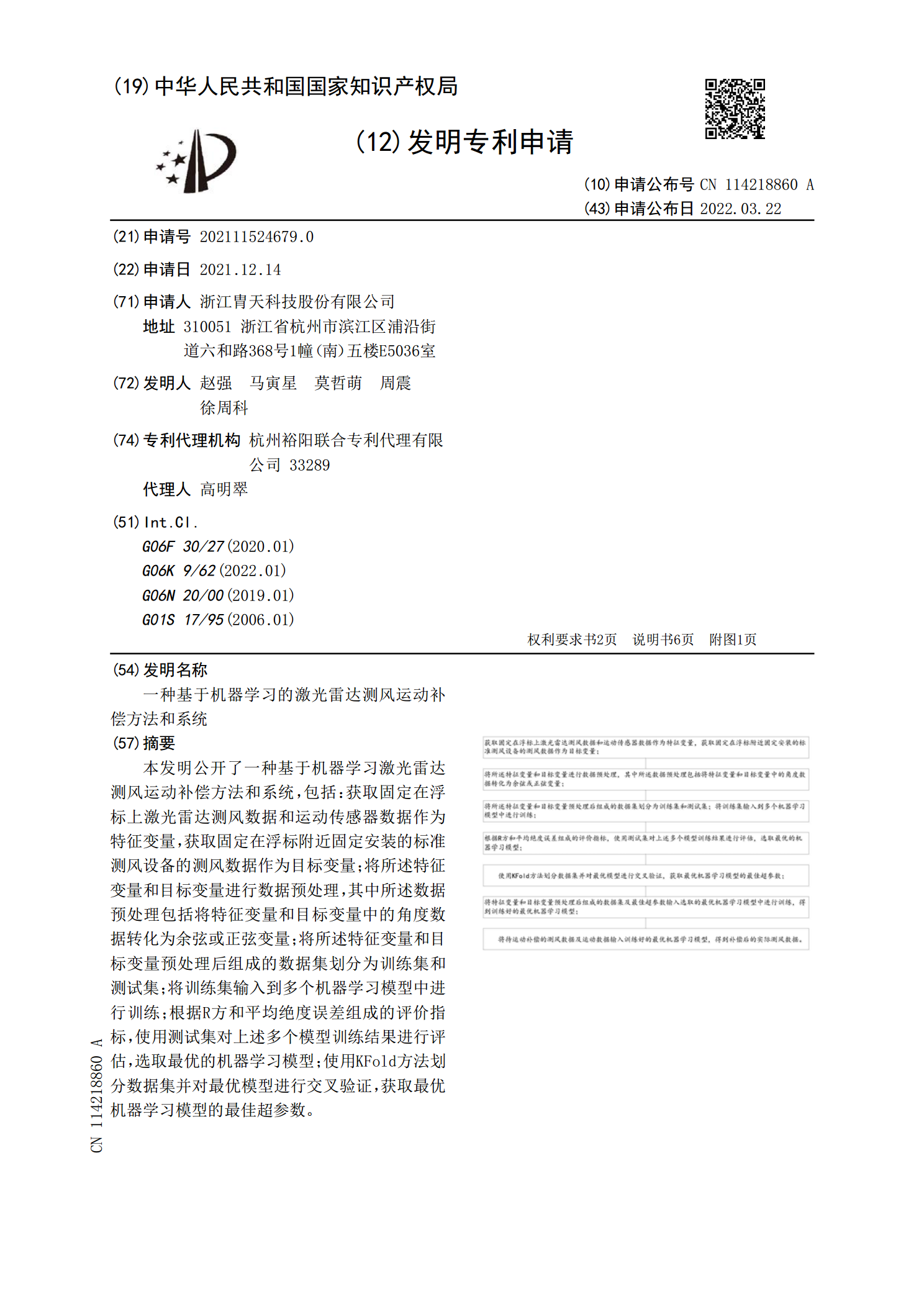
一种基于机器学习的激光雷达测风运动补偿方法和系统.pdf
本发明公开了一种基于机器学习激光雷达测风运动补偿方法和系统,包括:获取固定在浮标上激光雷达测风数据和运动传感器数据作为特征变量,获取固定在浮标附近固定安装的标准测风设备的测风数据作为目标变量;将所述特征变量和目标变量进行数据预处理,其中所述数据预处理包括将特征变量和目标变量中的角度数据转化为余弦或正弦变量;将所述特征变量和目标变量预处理后组成的数据集划分为训练集和测试集;将训练集输入到多个机器学习模型中进行训练;根据R方和平均绝度误差组成的评价指标,使用测试集对上述多个模型训练结果进行评估,选取最优的机器
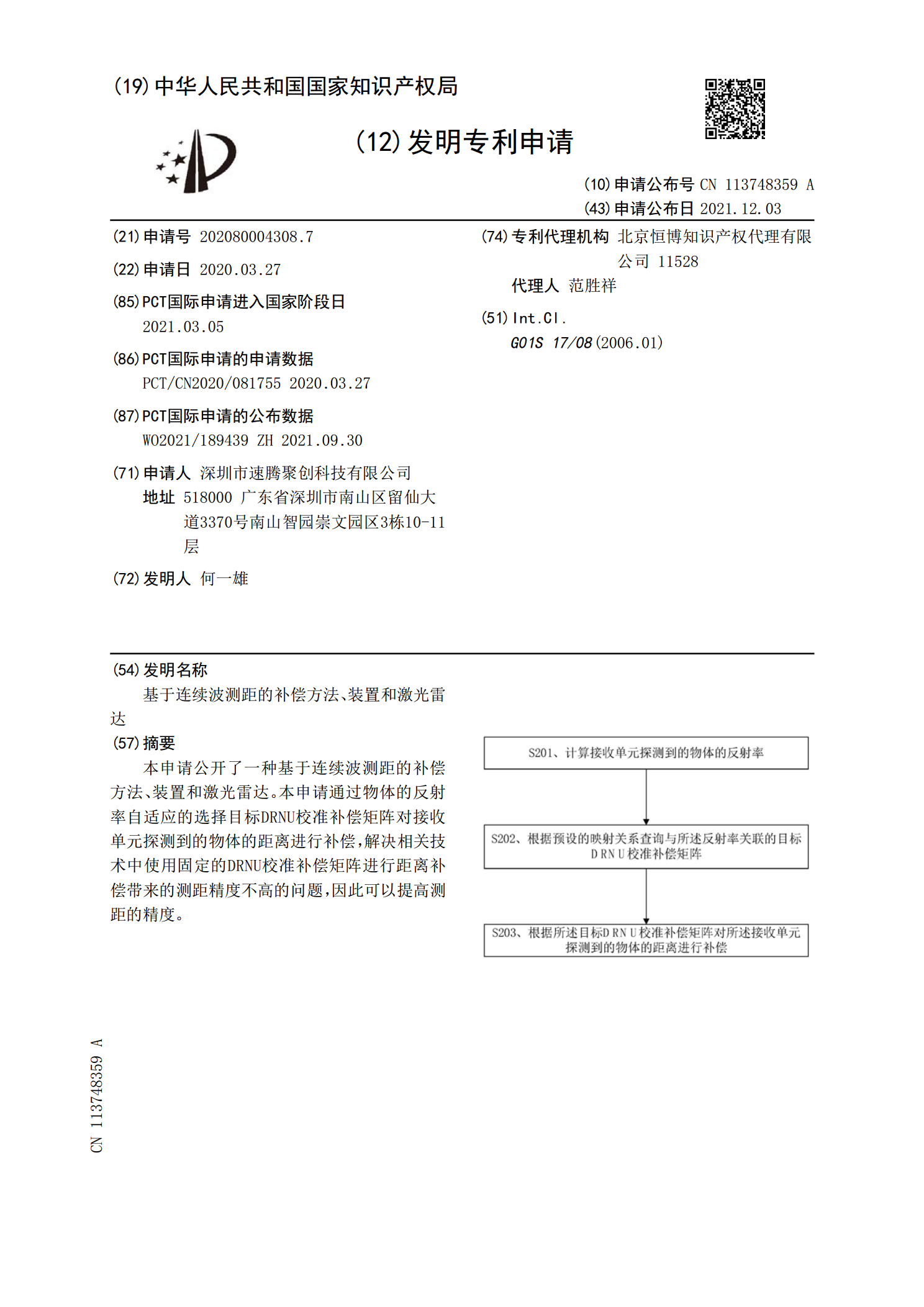
基于连续波测距的补偿方法、装置和激光雷达.pdf
本申请公开了一种基于连续波测距的补偿方法、装置和激光雷达。本申请通过物体的反射率自适应的选择目标DRNU校准补偿矩阵对接收单元探测到的物体的距离进行补偿,解决相关技术中使用固定的DRNU校准补偿矩阵进行距离补偿带来的测距精度不高的问题,因此可以提高测距的精度。
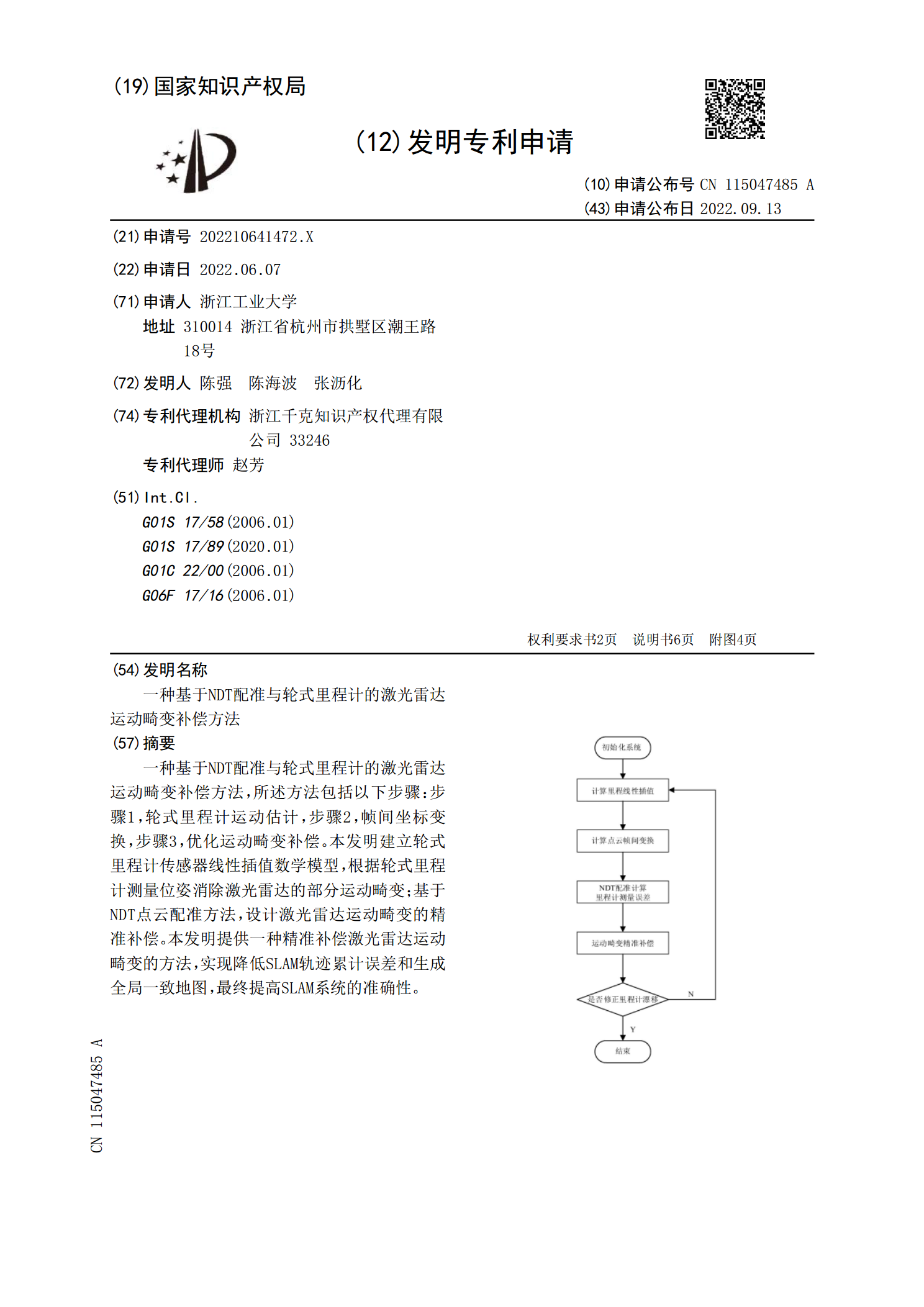
一种基于NDT配准与轮式里程计的激光雷达运动畸变补偿方法.pdf
一种基于NDT配准与轮式里程计的激光雷达运动畸变补偿方法,所述方法包括以下步骤:步骤1,轮式里程计运动估计,步骤2,帧间坐标变换,步骤3,优化运动畸变补偿。本发明建立轮式里程计传感器线性插值数学模型,根据轮式里程计测量位姿消除激光雷达的部分运动畸变;基于NDT点云配准方法,设计激光雷达运动畸变的精准补偿。本发明提供一种精准补偿激光雷达运动畸变的方法,实现降低SLAM轨迹累计误差和生成全局一致地图,最终提高SLAM系统的准确性。
一种基于NDT配准与轮式里程计的激光雷达运动畸变补偿方法.pdf
一种基于NDT配准与轮式里程计的激光雷达运动畸变补偿方法,所述方法包括以下步骤:步骤1,轮式里程计运动估计,步骤2,帧间坐标变换,步骤3,优化运动畸变补偿。本发明建立轮式里程计传感器线性插值数学模型,根据轮式里程计测量位姿消除激光雷达的部分运动畸变;基于NDT点云配准方法,设计激光雷达运动畸变的精准补偿。本发明提供一种精准补偿激光雷达运动畸变的方法,实现降低SLAM轨迹累计误差和生成全局一致地图,最终提高SLAM系统的准确性。