
基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化.docx
基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化摘要:伸缩臂是一种常见的机械装置,广泛应用于工业制造、机械系统和机器人等领域中。伸缩臂的运动路径优化可以提高机器人的运动效率和减少能量消耗。本文研究了基于Hopfield神经网络的单缸插销式伸缩臂伸缩路径优化方法,通过将Hopfield神经网络应用于路径规划中,实现了路径的快速优化和准确计算。实验结果表明,该方法在提高伸缩臂运动效率和减少能耗方面取得了显著的成果。关键词:伸缩臂、路径优化、H

伸缩臂起重机及其单缸插销式伸缩臂.pdf
本发明公开了一种单缸插销式伸缩臂,包括至少两节臂体、同时锁定相邻两节臂体的第一缸销和第二缸销,以及连接第一缸销和第二缸销的缸销同步装置;该缸销同步装置包括连杆、均连杆刚性连接的第一齿轮和第二齿轮;第一齿轮与第一缸销啮合,第二齿轮与第二缸销啮合;臂体的内部设有驱动臂体伸出的伸缩油缸,第一缸销和第二缸销均安装于伸缩油缸的缸头体上;缸销同步装置还包括驱动油缸,驱动油缸的固定端与缸头体固定连接,驱动油缸的自由端与连杆传动连接。该伸缩臂能显著提高缸销的同步性,并同时提高伸缩臂工作时的可靠性。本发明还提供一种包括上述

单缸插销式伸缩臂的几个关键技术问题探讨.docx
单缸插销式伸缩臂的几个关键技术问题探讨-1--4-单缸插销式伸缩臂的几个关键技术问题探讨一、前言随着我国经济建设的快速发展市场对大吨位轮式起重机的需求日益增大。目前国内大吨位轮式起重机基本依赖进口。为尽快抢占市场发展民族工业研究、开发大吨位轮式起重机已刻不容缓。伸缩臂作为轮式起重机的主要受力构件其重量一般占整机的13~20%而大型起重机占的比例则更大。因此伸缩臂技术对大吨位轮式起重机在大幅度、高起升高度情况下的性能起到至关重要的影响而伸缩臂的关键技术在于伸缩机构的型式。目前我国生产的汽车起重机以中

单缸插销伸缩臂可靠性分析.docx
单缸插销伸缩臂可靠性分析单缸插销伸缩臂可靠性分析摘要:随着科技的不断发展,工程技术也在不断进步,在机械领域,伸缩臂作为机械设备的核心部件之一,承担着重要的作用,而缸体作为伸缩臂的动力来源,更是非常重要的部件之一。本文主要探讨单缸插销伸缩臂的可靠性分析,阐述了其可靠性方面的问题和解决方法,以期为工程设计提供一定的参考。关键词:单缸插销伸缩臂,缸体,可靠性分析一、引言伸缩臂广泛应用于工程机械中,具有结构简单、承载能力强、操作灵活等优点。而伸缩臂的缸体作为其动力来源,承受着很大的压力,因此其可靠性非常重要。单缸
单缸插销式起重机及其伸缩油缸、伸缩油缸的缸头.pdf
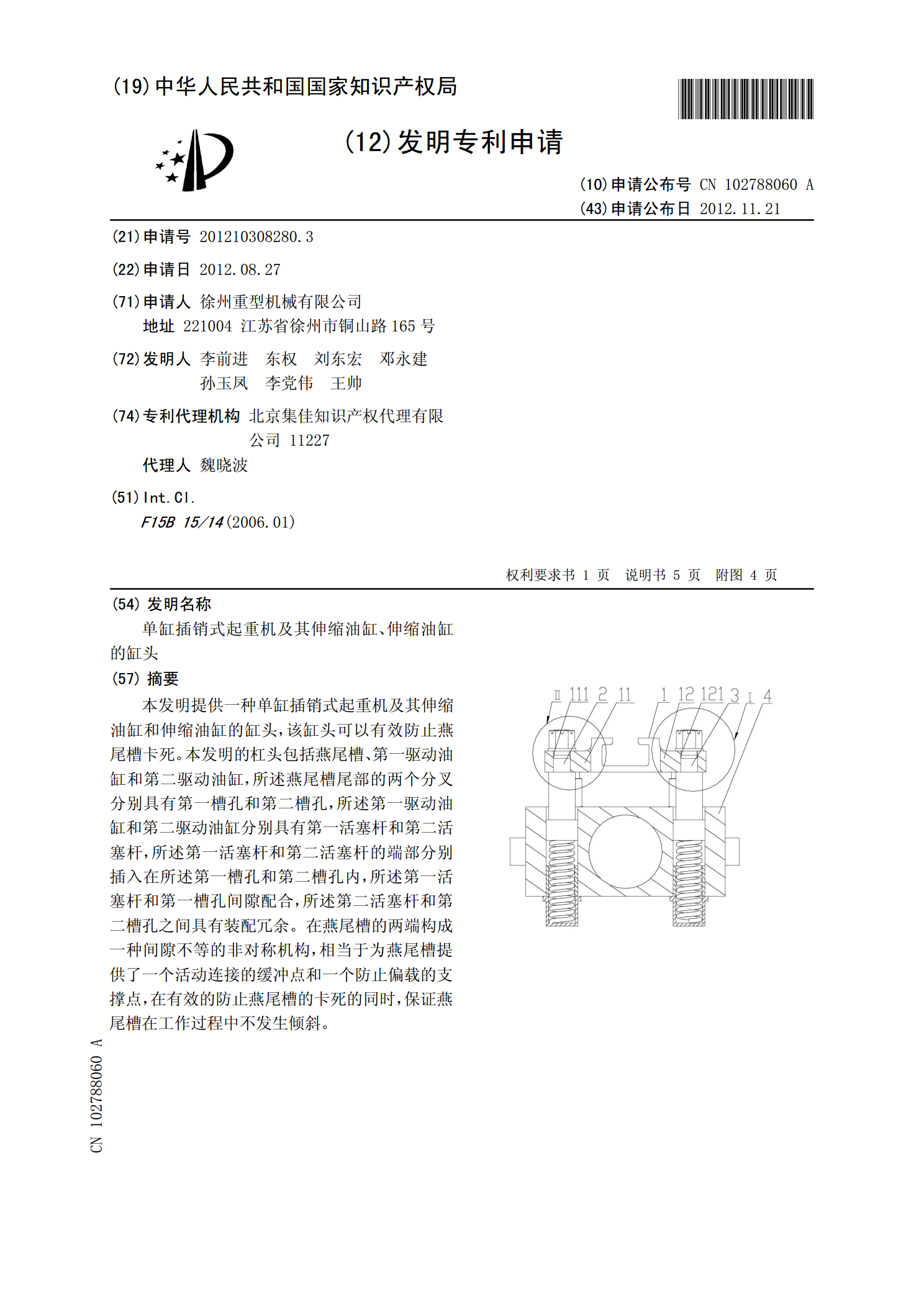
本发明提供一种单缸插销式起重机及其伸缩油缸和伸缩油缸的缸头,该缸头可以有效防止燕尾槽卡死。本发明的杠头包括燕尾槽、第一驱动油缸和第二驱动油缸,所述燕尾槽尾部的两个分叉分别具有第一槽孔和第二槽孔,所述第一驱动油缸和第二驱动油缸分别具有第一活塞杆和第二活塞杆,所述第一活塞杆和第二活塞杆的端部分别插入在所述第一槽孔和第二槽孔内,所述第一活塞杆和第一槽孔间隙配合,所述第二活塞杆和第二槽孔之间具有装配冗余。在燕尾槽的两端构成一种间隙不等的非对称机构,相当于为燕尾槽提供了一个活动连接的缓冲点和一个防止偏载的支撑点,在