
全景泊车辅助系统的关键技术.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全景泊车辅助系统的关键技术.docx
全景泊车辅助系统的关键技术全景泊车辅助系统的关键技术摘要:全景泊车辅助系统是一种用于辅助驾驶员在狭窄的泊车空间中进行准确、安全倒车的技术。本论文将对全景泊车辅助系统的关键技术进行探讨和分析,包括传感器技术、图像处理技术和驾驶员交互技术等方面。1.引言随着汽车智能化技术的不断发展,全景泊车辅助系统作为现代汽车安全行驶的重要组成部分,对提高驾驶员的泊车能力和行驶安全起着至关重要的作用。本论文将对全景泊车辅助系统的关键技术进行研究和总结。2.全景泊车辅助系统的原理全景泊车辅助系统通过使用多种传感器和图像处理技术
一种全景泊车辅助系统.pdf
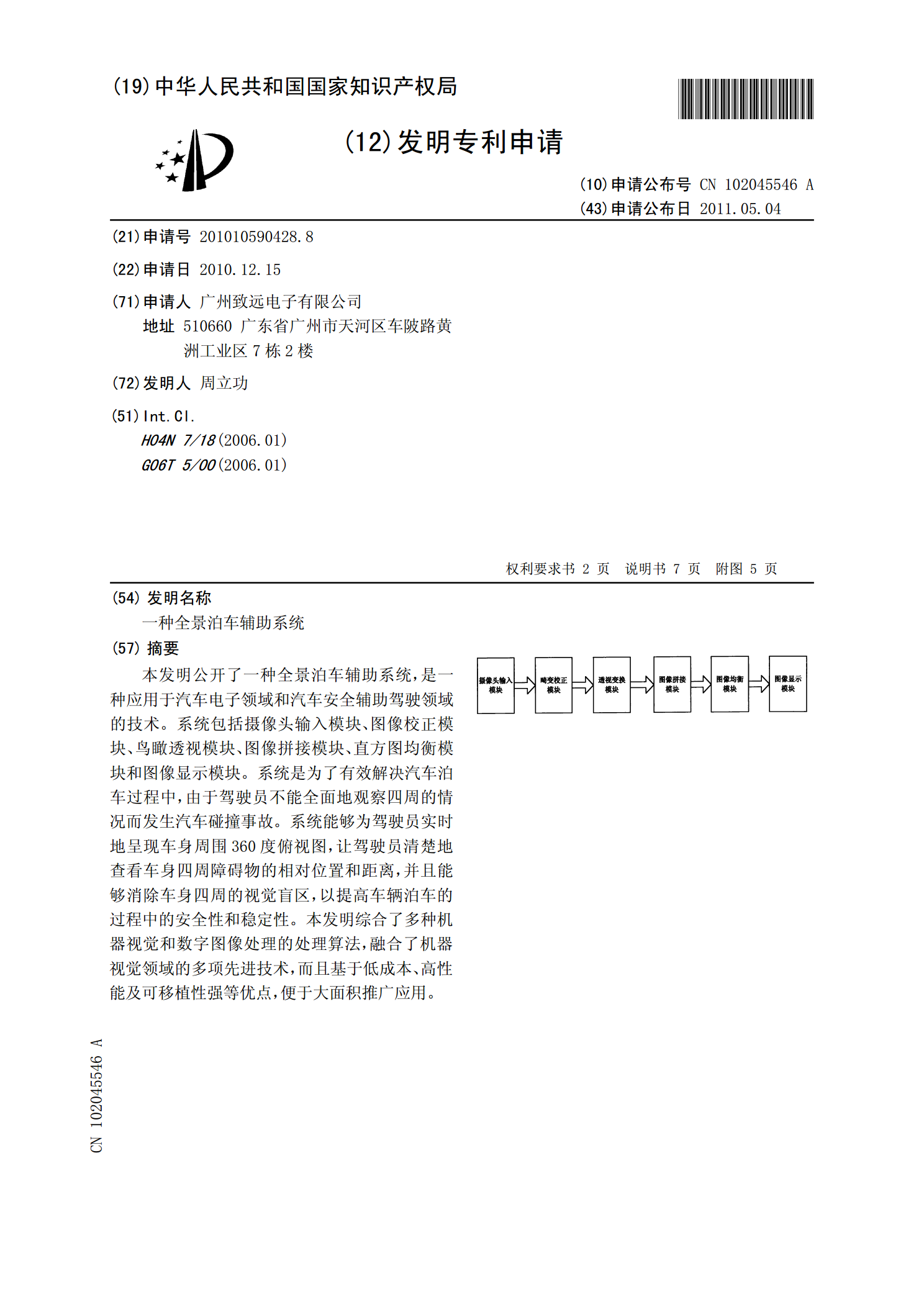
本发明公开了一种全景泊车辅助系统,是一种应用于汽车电子领域和汽车安全辅助驾驶领域的技术。系统包括摄像头输入模块、图像校正模块、鸟瞰透视模块、图像拼接模块、直方图均衡模块和图像显示模块。系统是为了有效解决汽车泊车过程中,由于驾驶员不能全面地观察四周的情况而发生汽车碰撞事故。系统能够为驾驶员实时地呈现车身周围360度俯视图,让驾驶员清楚地查看车身四周障碍物的相对位置和距离,并且能够消除车身四周的视觉盲区,以提高车辆泊车的过程中的安全性和稳定性。本发明综合了多种机器视觉和数字图像处理的处理算法,融合了机器视觉领
一种全景辅助泊车系统、装置及全景图像显示方法.pdf
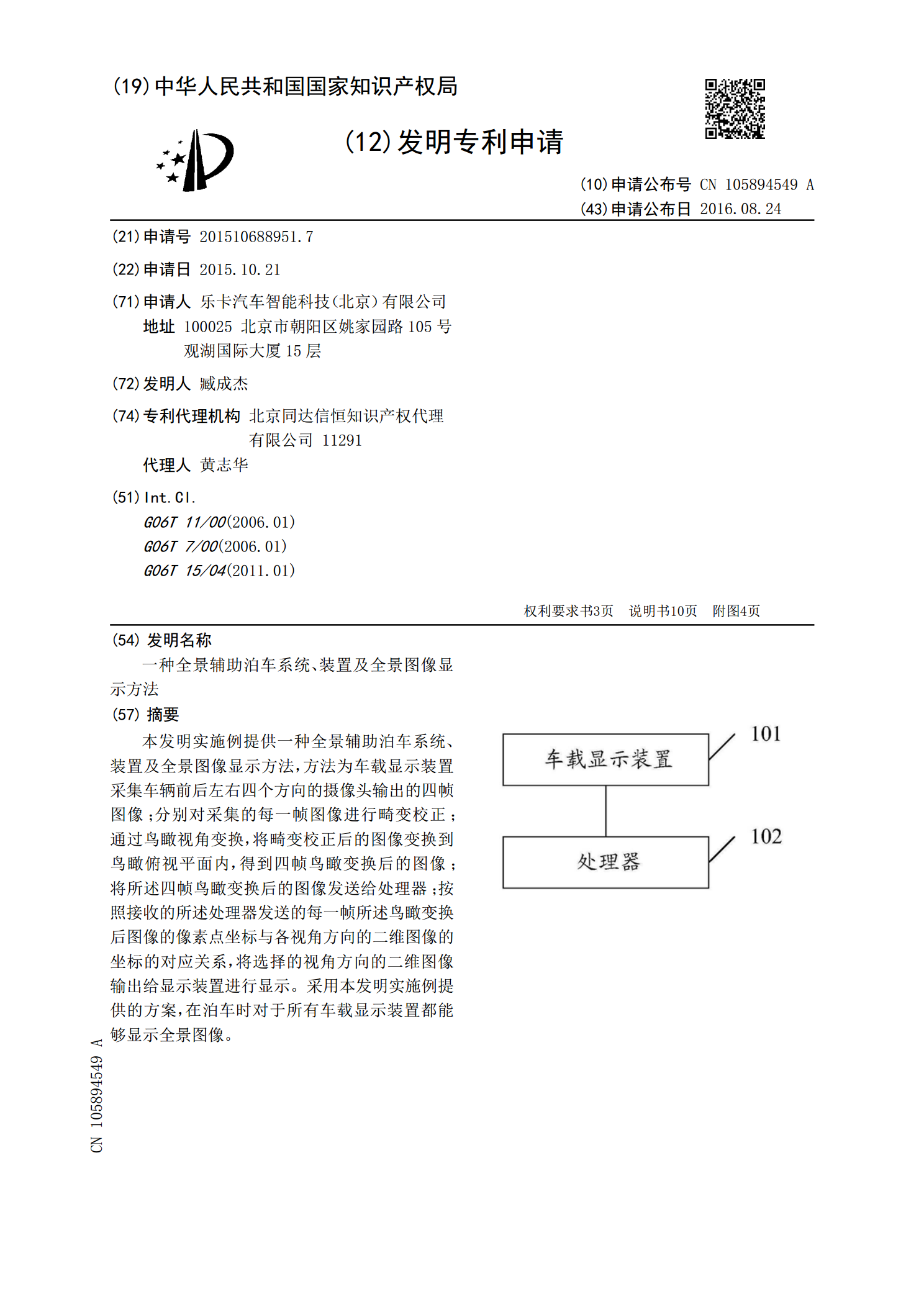
本发明实施例提供一种全景辅助泊车系统、装置及全景图像显示方法,方法为车载显示装置采集车辆前后左右四个方向的摄像头输出的四帧图像;分别对采集的每一帧图像进行畸变校正;通过鸟瞰视角变换,将畸变校正后的图像变换到鸟瞰俯视平面内,得到四帧鸟瞰变换后的图像;将所述四帧鸟瞰变换后的图像发送给处理器;按照接收的所述处理器发送的每一帧所述鸟瞰变换后图像的像素点坐标与各视角方向的二维图像的坐标的对应关系,将选择的视角方向的二维图像输出给显示装置进行显示。采用本发明实施例提供的方案,在泊车时对于所有车载显示装置都能够显示全景

多视点全景图像辅助泊车系统研究.doc
多视点全景图像辅助泊车系统研究驾驶员在泊车时,受到视野和车位狭小等客观条件的限制,极易发生擦碰事故,带来不必要的损失。因此,研究和设计一套能提供车身周围实时画面、消除视野盲区的全景图像辅助泊车系统,将给驾驶员泊车提供有效的辅助作用。本文在深入分析现有泊车系统的基础上,研究了全景图像辅助泊车系统中的关键技术,设计了实现此技术的方案:在车前,车尾,左右外后视镜分别安装四个鱼眼摄像头获取图像;对所得图像进行去失真处理,得到校正后图像再将其投影到某一虚拟视点为原点的坐标系下;通过提取图像SIFT特征确定待拼接图像

多视点全景图像辅助泊车系统研究.doc
多视点全景图像辅助泊车系统研究驾驶员在泊车时,受到视野和车位狭小等客观条件的限制,极易发生擦碰事故,带来不必要的损失。因此,研究和设计一套能提供车身周围实时画面、消除视野盲区的全景图像辅助泊车系统,将给驾驶员泊车提供有效的辅助作用。本文在深入分析现有泊车系统的基础上,研究了全景图像辅助泊车系统中的关键技术,设计了实现此技术的方案:在车前,车尾,左右外后视镜分别安装四个鱼眼摄像头获取图像;对所得图像进行去失真处理,得到校正后图像再将其投影到某一虚拟视点为原点的坐标系下;通过提取图像SIFT特征确定待拼接图像