
一种全景辅助泊车系统、装置及全景图像显示方法.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全景辅助泊车系统、装置及全景图像显示方法.pdf
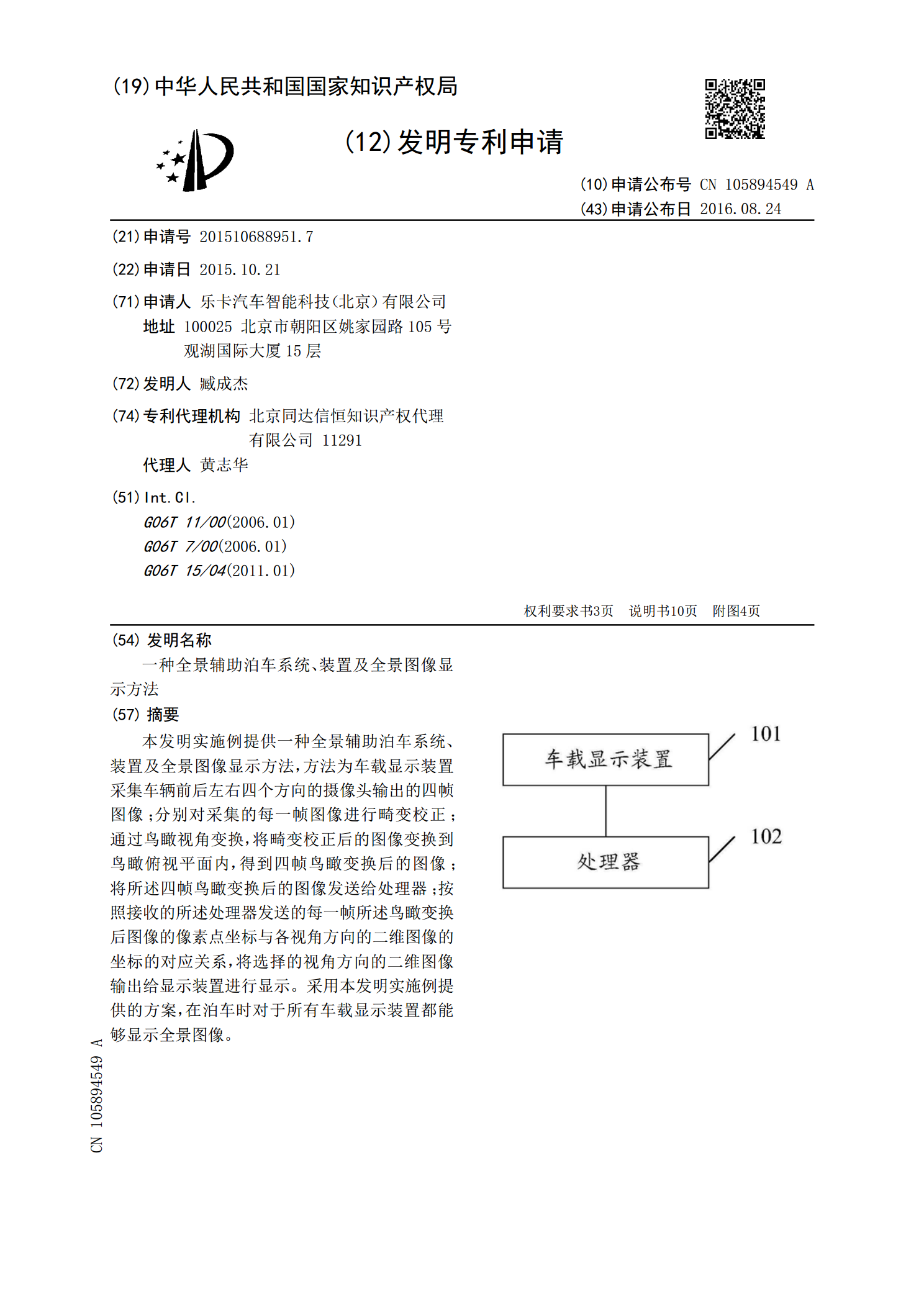
本发明实施例提供一种全景辅助泊车系统、装置及全景图像显示方法,方法为车载显示装置采集车辆前后左右四个方向的摄像头输出的四帧图像;分别对采集的每一帧图像进行畸变校正;通过鸟瞰视角变换,将畸变校正后的图像变换到鸟瞰俯视平面内,得到四帧鸟瞰变换后的图像;将所述四帧鸟瞰变换后的图像发送给处理器;按照接收的所述处理器发送的每一帧所述鸟瞰变换后图像的像素点坐标与各视角方向的二维图像的坐标的对应关系,将选择的视角方向的二维图像输出给显示装置进行显示。采用本发明实施例提供的方案,在泊车时对于所有车载显示装置都能够显示全景
一种全景泊车辅助系统.pdf
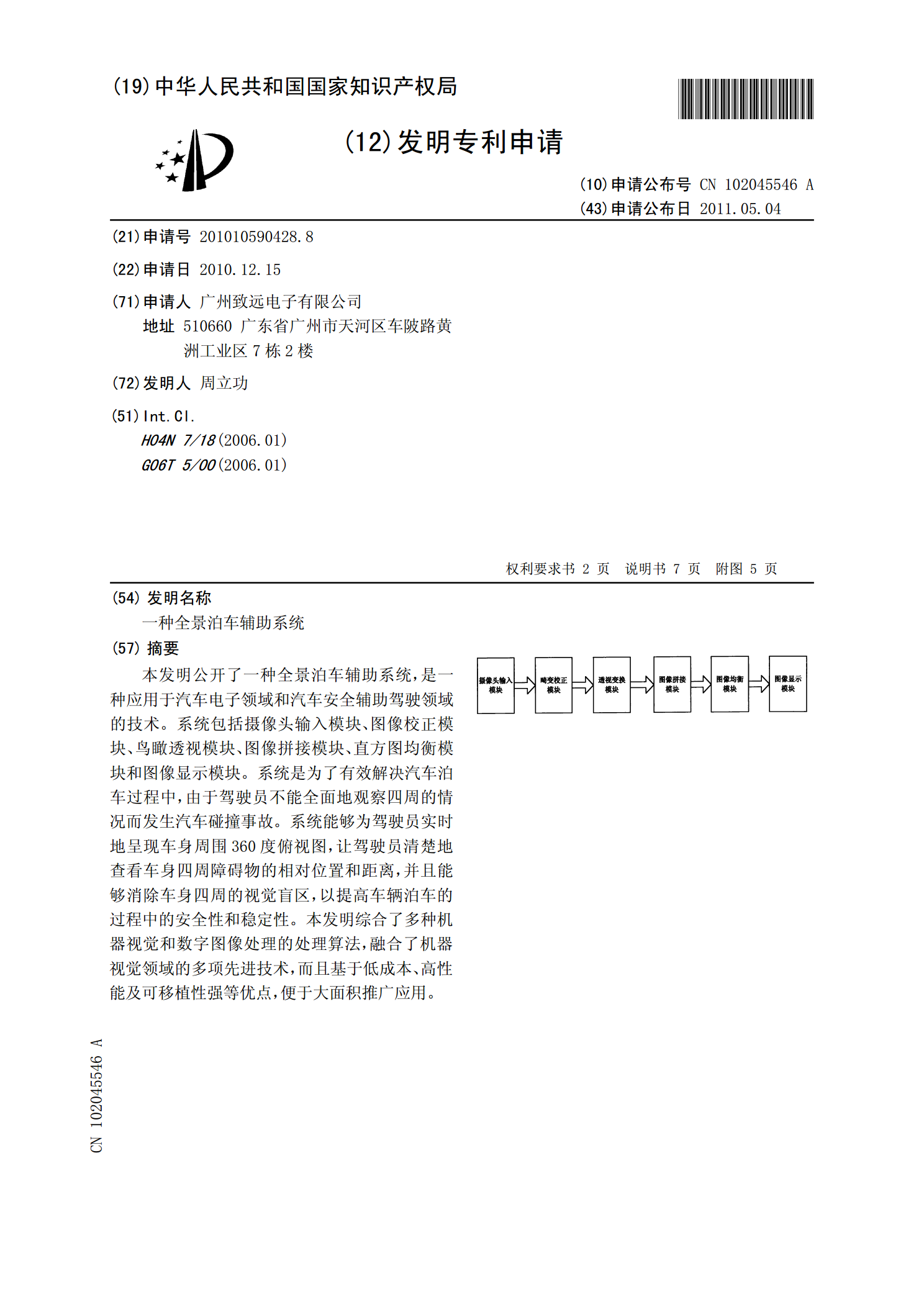
本发明公开了一种全景泊车辅助系统,是一种应用于汽车电子领域和汽车安全辅助驾驶领域的技术。系统包括摄像头输入模块、图像校正模块、鸟瞰透视模块、图像拼接模块、直方图均衡模块和图像显示模块。系统是为了有效解决汽车泊车过程中,由于驾驶员不能全面地观察四周的情况而发生汽车碰撞事故。系统能够为驾驶员实时地呈现车身周围360度俯视图,让驾驶员清楚地查看车身四周障碍物的相对位置和距离,并且能够消除车身四周的视觉盲区,以提高车辆泊车的过程中的安全性和稳定性。本发明综合了多种机器视觉和数字图像处理的处理算法,融合了机器视觉领
全景图像显示装置和全景图像显示方法.pdf
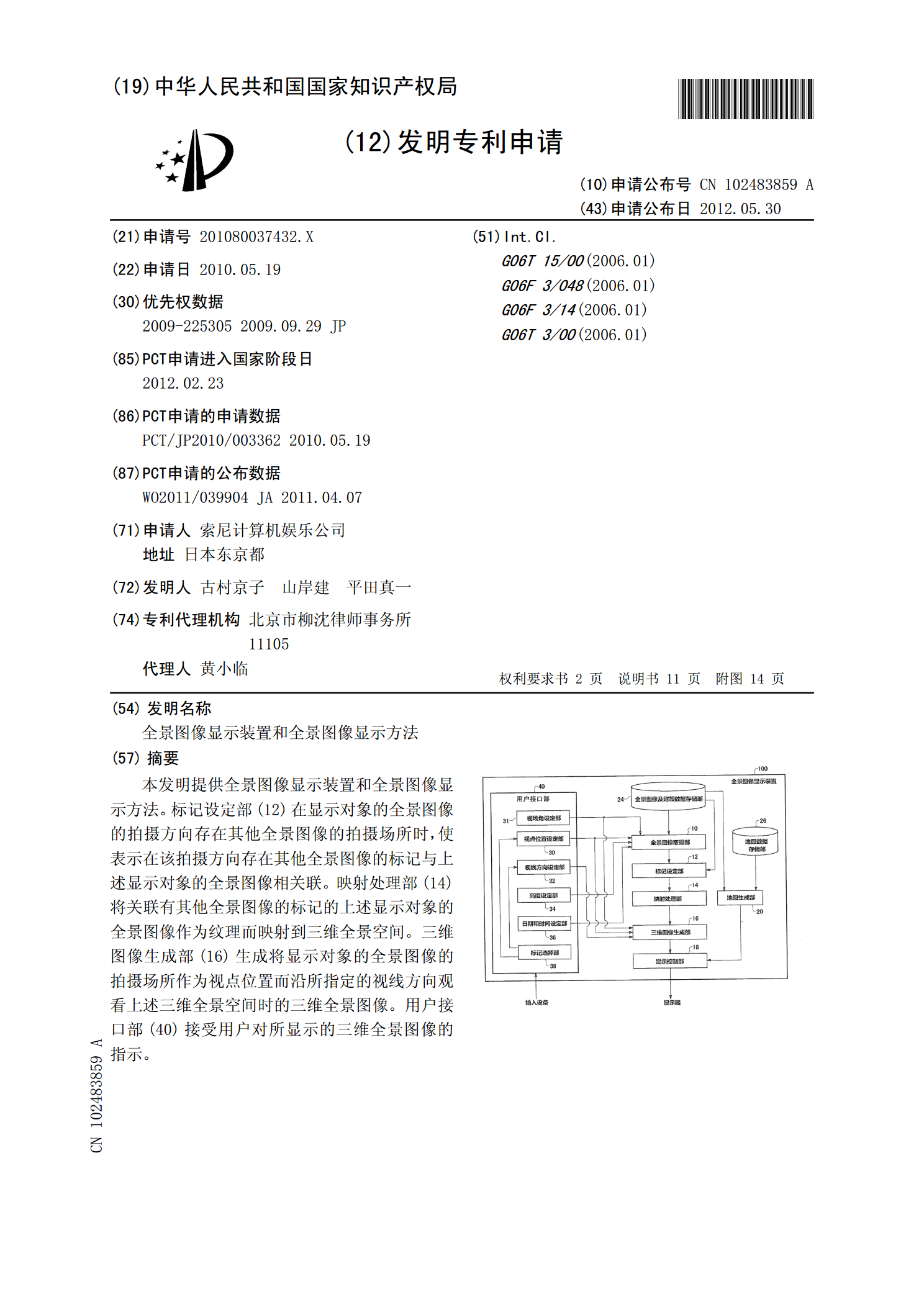
本发明提供全景图像显示装置和全景图像显示方法。标记设定部(12)在显示对象的全景图像的拍摄方向存在其他全景图像的拍摄场所时,使表示在该拍摄方向存在其他全景图像的标记与上述显示对象的全景图像相关联。映射处理部(14)将关联有其他全景图像的标记的上述显示对象的全景图像作为纹理而映射到三维全景空间。三维图像生成部(16)生成将显示对象的全景图像的拍摄场所作为视点位置而沿所指定的视线方向观看上述三维全景空间时的三维全景图像。用户接口部(40)接受用户对所显示的三维全景图像的指示。

全景图像信息显示方法、装置及系统.pdf
本发明提供一种全景图像信息显示方法、装置及系统,涉及信息技术领域,主要目的是解决现有技术中全景图像信息显示速度较慢和网络传输带宽消耗较大的缺陷。所述方法包括:接收全景图像信息获取请求,所述全景图像信息获取请求中携带当前视线方向信息;根据所述当前视线方向信息渲染与所述当前视线方向信息对应的图像信息;将与所述当前视线方向信息对应的图像信息进行传输,与所述当前视线方向信息对应的图像信息用于显示。本发明适用于全景图像信息的显示。

全景泊车图像畸变校正方法及装置.pdf
本发明提供的全景泊车图像畸变校正方法及装置,通过在物理坐标系下,以设于车身的广角的图像采集装置为中心建立一个虚拟柱面,其中,所述虚拟柱面的中轴方向可变;利用标定数据,将图像采集装置所采集画面反向投影至该虚拟柱面上以形成重投影图像;将所述虚拟柱面上的重投影图像裁切输出;不仅消除了画面上的严重畸变,又保留了足够的原始图像信息,并且,输出图像为一个与摄像机安装角度无关的更加灵活的可变视角,使得画面更加直观。