
无人飞行器集群智能调度技术综述.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人飞行器集群智能调度技术综述.docx
无人飞行器集群智能调度技术综述无人飞行器(UAV)的快速发展和广泛应用为各种领域提供了全新的机会和挑战。随着无人飞行器数量的增加和任务复杂度的提高,如何高效地调度和协调多个无人飞行器成为一个重要的课题。集群智能调度技术作为一种新兴的调度方法,在无人飞行器系统中的应用受到了广泛关注。本文将综述无人飞行器集群智能调度技术的研究现状、方法和挑战等方面,以期为相关领域的研究和实践提供参考。一、研究现状无人飞行器集群智能调度技术主要涉及多无人飞行器的路径规划、任务分配和协同控制等方面。现有的研究主要集中在以下几个方

“低慢小”无人飞行器反制技术综述.docx
“低慢小”无人飞行器反制技术综述随着无人飞行器的普及和发展,出现了一些不法分子利用无人飞行器进行非法侵犯的情况,如无人机的窥探、偷拍、扰民等现象。此外,无人机本身的质量轻、体积小、飞行速度快,在用于恐怖袭击和破坏性行动时也会带来极大的危险。因此,对无人飞行器进行反制至关重要。一种常见的无人飞行器反制技术是“低慢小”无人飞行器反制技术。该技术主要针对在低空、低速、小型无人机进行反制,下面将详细介绍其相关技术和方法。1.射频干扰技术射频干扰技术是指通过向无人飞行器输入强大的射频干扰信号,使其无法正常工作或控制

异构无人系统集群自主协同关键技术综述.docx
异构无人系统集群自主协同关键技术综述1.内容简述随着科技的发展和人工智能技术的不断进步,无人系统在各个领域得到了广泛的应用。异构无人系统集群作为一种新型的无人系统形态,具有高度的自主性和协同性,能够有效地解决传统无人系统在复杂环境下的控制和任务执行问题。本文将对异构无人系统集群自主协同关键技术进行综述,包括异构集群的组成结构、通信协议、协同控制方法、任务分配与调度等方面。通过对这些关键技术的研究,为异构无人系统集群的设计与实现提供理论支持和技术指导。1.1研究背景和意义随着科技的不断发展,无人系统技术在各

无人机集群智能的生成样式研究.pptx
,目录PartOnePartTwo无人机集群智能的定义无人机集群智能的应用场景无人机集群智能的研究意义PartThree基于规则的生成样式基于学习的生成样式基于混合方法的生成样式PartFour无人机间的通信与协作技术无人机的感知与定位技术无人机集群的控制技术无人机集群的任务分配与调度技术PartFive无人机集群智能技术的挑战与机遇无人机集群智能技术的发展趋势无人机集群智能技术在未来的应用前景THANKS
基于无人机集群的智能巡查系统.pdf
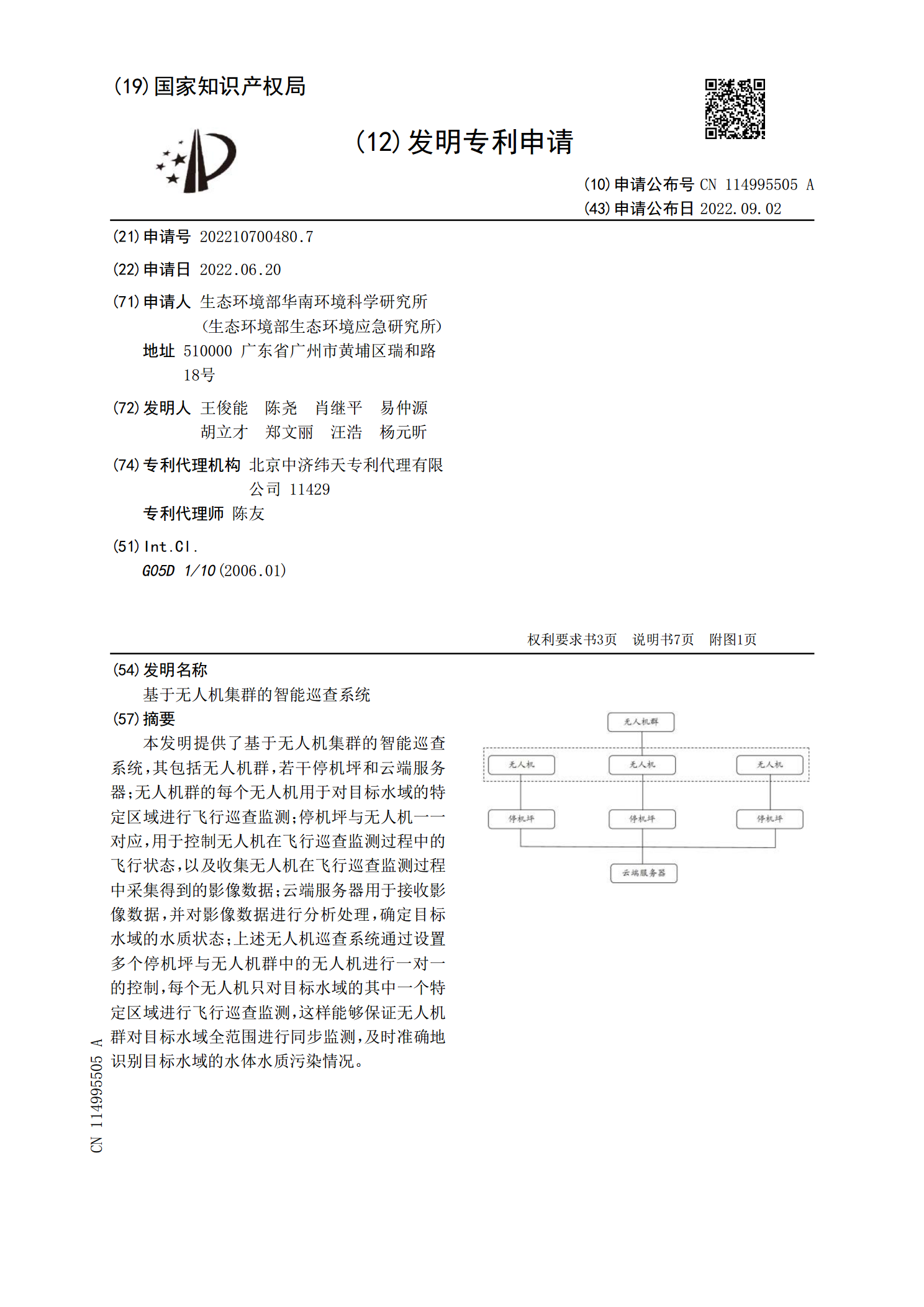
本发明提供了基于无人机集群的智能巡查系统,其包括无人机群,若干停机坪和云端服务器;无人机群的每个无人机用于对目标水域的特定区域进行飞行巡查监测;停机坪与无人机一一对应,用于控制无人机在飞行巡查监测过程中的飞行状态,以及收集无人机在飞行巡查监测过程中采集得到的影像数据;云端服务器用于接收影像数据,并对影像数据进行分析处理,确定目标水域的水质状态;上述无人机巡查系统通过设置多个停机坪与无人机群中的无人机进行一对一的控制,每个无人机只对目标水域的其中一个特定区域进行飞行巡查监测,这样能够保证无人机群对目标水域全