
基于无人机集群的智能巡查系统.pdf

一吃****仕龙

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无人机集群的智能巡查系统.pdf
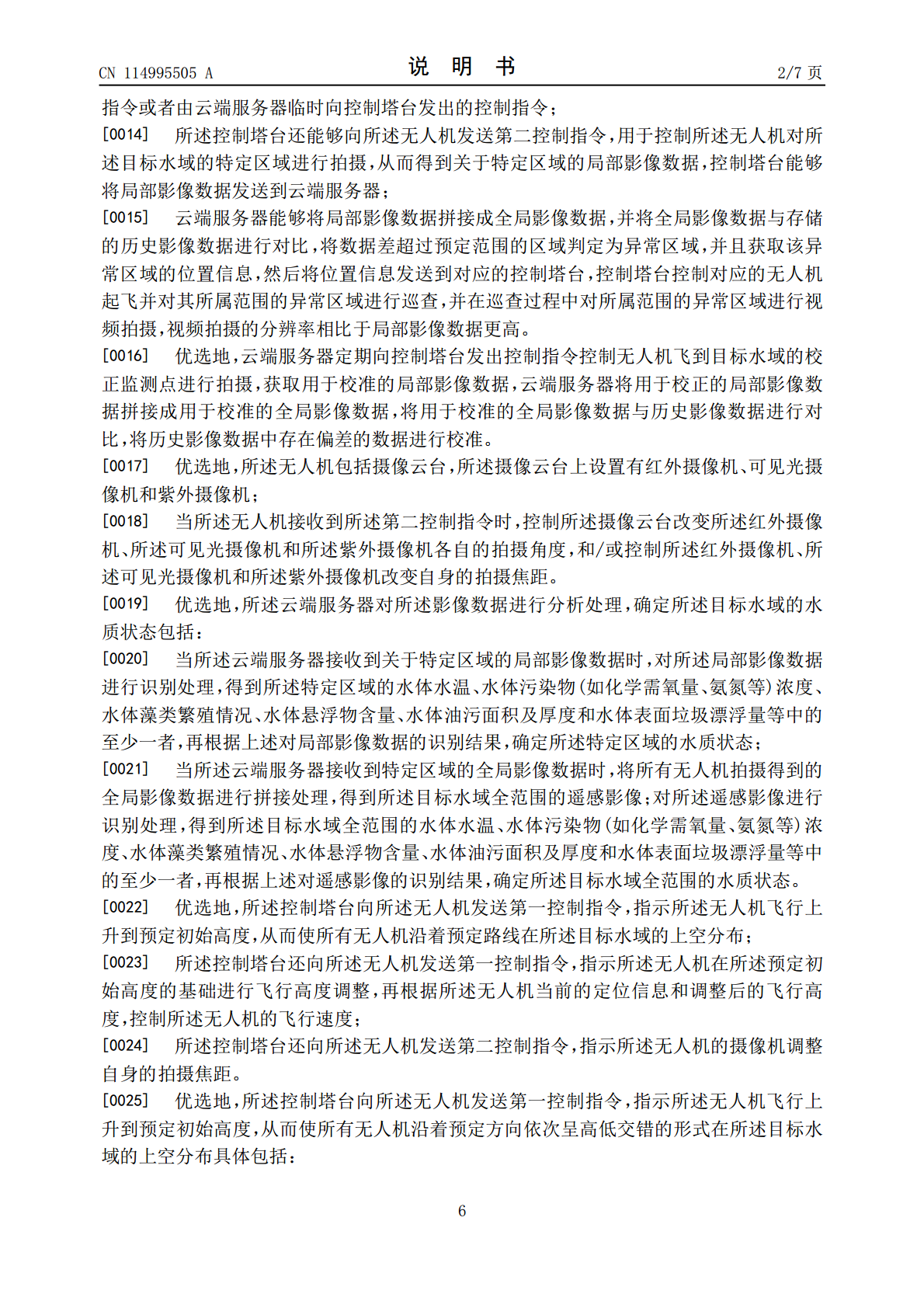
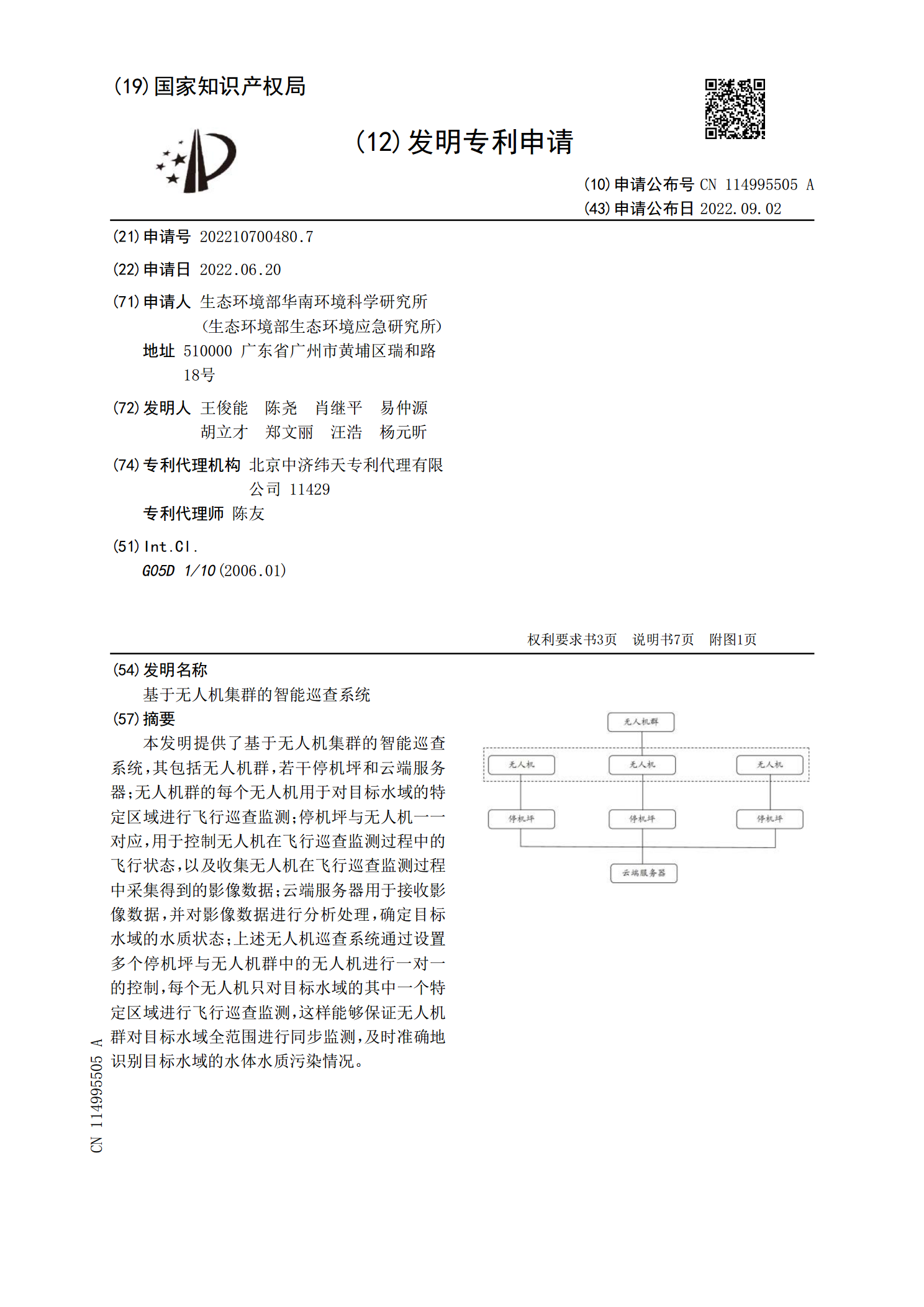
本发明提供了基于无人机集群的智能巡查系统,其包括无人机群,若干停机坪和云端服务器;无人机群的每个无人机用于对目标水域的特定区域进行飞行巡查监测;停机坪与无人机一一对应,用于控制无人机在飞行巡查监测过程中的飞行状态,以及收集无人机在飞行巡查监测过程中采集得到的影像数据;云端服务器用于接收影像数据,并对影像数据进行分析处理,确定目标水域的水质状态;上述无人机巡查系统通过设置多个停机坪与无人机群中的无人机进行一对一的控制,每个无人机只对目标水域的其中一个特定区域进行飞行巡查监测,这样能够保证无人机群对目标水域全
基于智能合约的无人机集群安全性研究.pdf
第22卷第8期软件导刊Vol.22No.82023年8月SoftwareGuideAug.2023基于智能合约的无人机集群安全性研究杨忠举,朱卫星,何红悦,王梅娟(中国人民解放军陆军工程大学指挥控制工程学院,江苏南京210007)摘要:智能合约是区块链的重要组成部分,具有去中心化、可追溯、自动化执行以及不可篡改等特点,在理论和技术层面能够有效适应无人机集群安全性方面的需求。以智能合约在无人机集群中飞行数据管理、自主协同、安全维护以及安全认证4个方面的应用为例,重点分析智能合约在应用过程中潜在的整数溢出、时
基于智能合约的无人机集群安全性研究.pdf
第22卷第8期软件导刊Vol.22No.82023年8月SoftwareGuideAug.2023基于智能合约的无人机集群安全性研究杨忠举,朱卫星,何红悦,王梅娟(中国人民解放军陆军工程大学指挥控制工程学院,江苏南京210007)摘要:智能合约是区块链的重要组成部分,具有去中心化、可追溯、自动化执行以及不可篡改等特点,在理论和技术层面能够有效适应无人机集群安全性方面的需求。以智能合约在无人机集群中飞行数据管理、自主协同、安全维护以及安全认证4个方面的应用为例,重点分析智能合约在应用过程中潜在的整数溢出、时

基于智能合约的无人机集群安全性研究.pdf
第22卷第8期软件导刊Vol.22No.82023年8月SoftwareGuideAug.2023基于智能合约的无人机集群安全性研究杨忠举,朱卫星,何红悦,王梅娟(中国人民解放军陆军工程大学指挥控制工程学院,江苏南京210007)摘要:智能合约是区块链的重要组成部分,具有去中心化、可追溯、自动化执行以及不可篡改等特点,在理论和技术层面能够有效适应无人机集群安全性方面的需求。以智能合约在无人机集群中飞行数据管理、自主协同、安全维护以及安全认证4个方面的应用为例,重点分析智能合约在应用过程中潜在的整数溢出、时
基于非均匀智能超表面阵列的无人机集群测向系统及方法.pdf
本发明公开了一种基于非均匀智能超表面阵列的无人机集群测向系统及方法,利用非均匀智能超表面阵列对来波进行多次测量,由全向接收天线接收反射信号。针对全向接收天线接收到的信号,构建多次测量后的反射信号模型,通过挖掘无人机集群目标的空域稀疏特性,采用稀疏重构算法,理论推导了未知到达角的求解表达式。方法通过构建一种新的原子范数,建立起稀疏重构问题,使用半正定规划问题求解相应的凸优化问题,实现对无人机集群信号到达角的稀疏估计。