
基于电动助力转向系统的转向盘转角跟随算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于电动助力转向系统的转向盘转角跟随算法.docx
基于电动助力转向系统的转向盘转角跟随算法基于电动助力转向系统的转向盘转角跟随算法摘要:随着智能化技术的发展,车辆的转向控制系统变得越来越复杂。电动助力转向系统作为其中一种新型的转向系统,具有更高的精度和灵活性。本论文提出了一种基于电动助力转向系统的转向盘转角跟随算法,通过对传感器数据的实时处理和控制指令的生成,实现了良好的转向盘转角跟随效果。1.引言随着汽车行业的快速发展,转向系统的性能和安全性要求也越来越高。传统的转向系统通常使用液压助力转向,但是其反应速度慢、操控性较差。相比之下,电动助力转向系统具有

基于电动助力转向系统的转向盘转角跟随算法.docx
基于电动助力转向系统的转向盘转角跟随算法本文基于电动助力转向系统的转向盘转角跟随算法,对该算法的原理、应用场景、实现方法进行探讨。首先,介绍了电动助力转向系统和转向盘转角跟随算法的背景及意义,其次,阐述了转向盘转角跟随算法的原理及实现步骤,最后,探讨了该算法的应用场景及未来发展趋势。一、电动助力转向系统及转向盘转角跟随算法概述现代汽车的转向系统一般分为机械式助力转向系统和电动助力转向系统两种。机械式助力转向系统是在机械部件上采用特殊的结构设计和材料搭配,在较小的力量作用下就可以带动车辆转向,因此更为轻便、

基于转向盘角速度的电动助力转向系统回正控制.docx
基于转向盘角速度的电动助力转向系统回正控制一、引言随着社会的不断发展,汽车已经成为现代交通工具中不可或缺的一部分。在现代汽车技术中,电动助力转向技术已经逐渐成为一个重要的发展方向。与传统的机械助力转向相比,电动助力转向具有更高的精度和更好的稳定性。本文将重点研究基于转向盘角速度的电动助力转向系统回正控制。二、电动助力转向系统的基本原理电动助力转向系统是由电动助力转向机构、传感器、控制器和执行器组成的一种现代汽车才具有的转向系统。其基本原理是利用电动机提供的动力辅助驾驶员转动方向盘,并通过传感器监测方向盘转
用于电动助力转向系统的齿条、电动助力转向系统和车辆.pdf
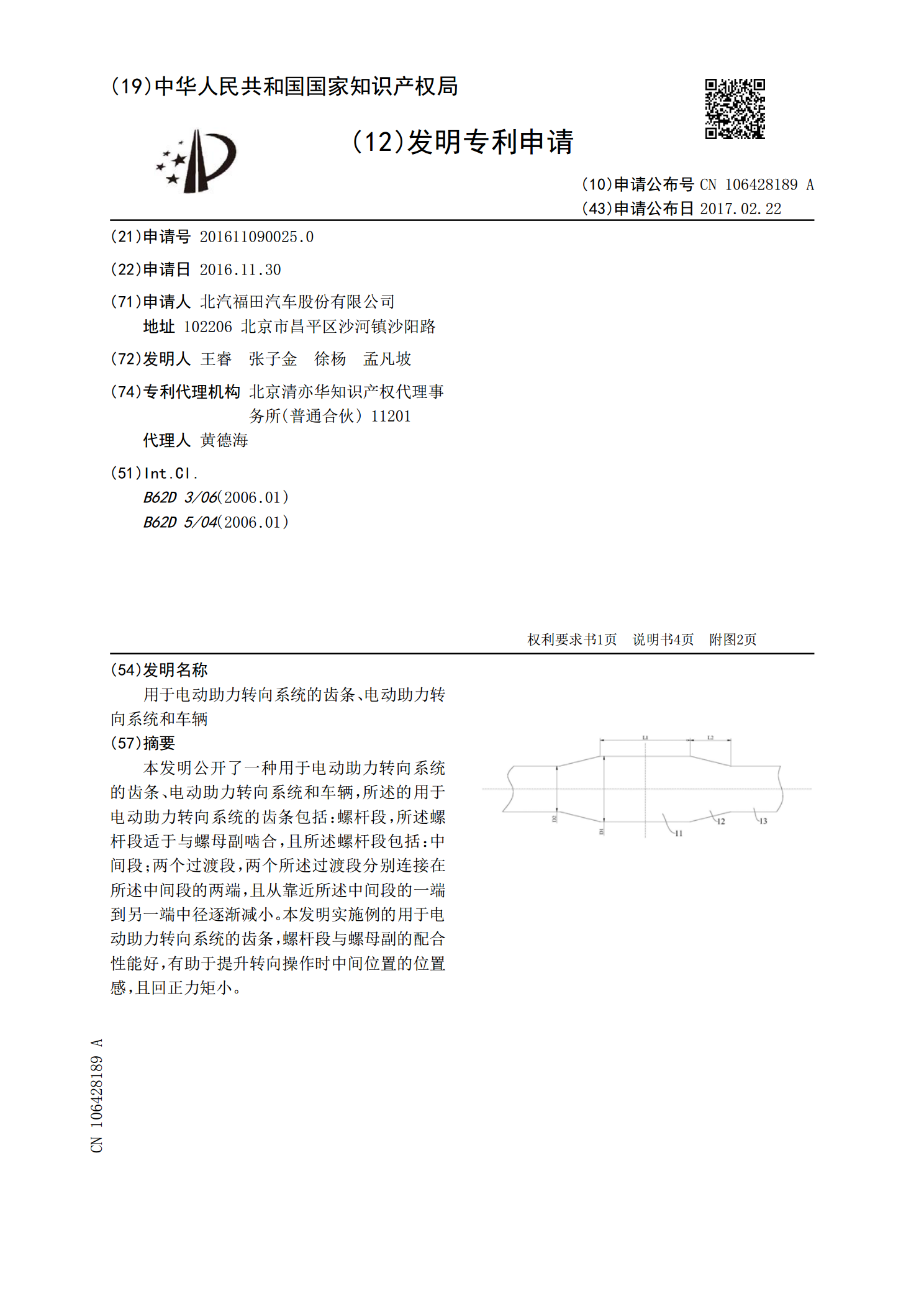
本发明公开了一种用于电动助力转向系统的齿条、电动助力转向系统和车辆,所述的用于电动助力转向系统的齿条包括:螺杆段,所述螺杆段适于与螺母副啮合,且所述螺杆段包括:中间段;两个过渡段,两个所述过渡段分别连接在所述中间段的两端,且从靠近所述中间段的一端到另一端中径逐渐减小。本发明实施例的用于电动助力转向系统的齿条,螺杆段与螺母副的配合性能好,有助于提升转向操作时中间位置的位置感,且回正力矩小。
电动汽车电动助力转向系统及其转向助力方法.pdf
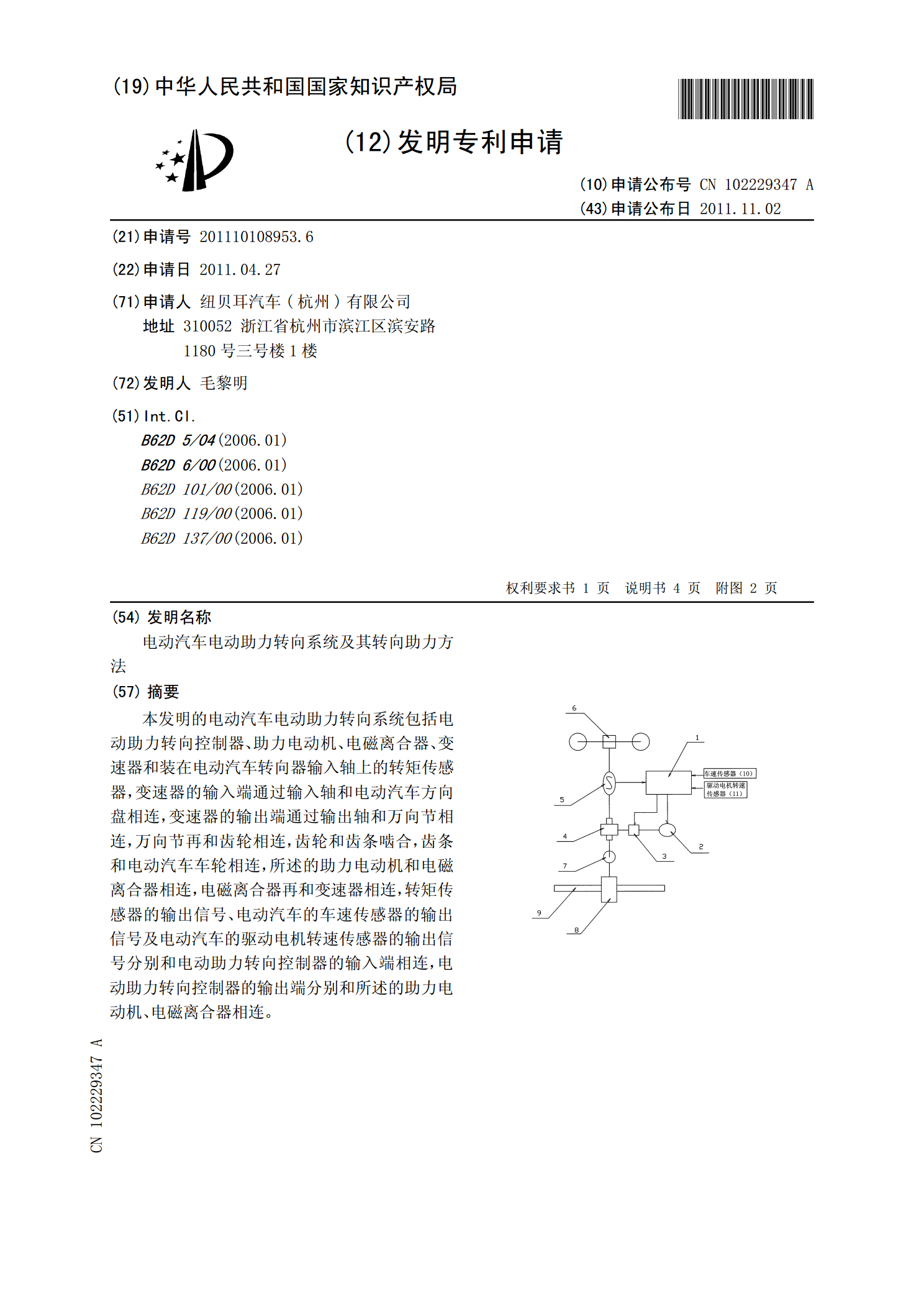
本发明的电动汽车电动助力转向系统包括电动助力转向控制器、助力电动机、电磁离合器、变速器和装在电动汽车转向器输入轴上的转矩传感器,变速器的输入端通过输入轴和电动汽车方向盘相连,变速器的输出端通过输出轴和万向节相连,万向节再和齿轮相连,齿轮和齿条啮合,齿条和电动汽车车轮相连,所述的助力电动机和电磁离合器相连,电磁离合器再和变速器相连,转矩传感器的输出信号、电动汽车的车速传感器的输出信号及电动汽车的驱动电机转速传感器的输出信号分别和电动助力转向控制器的输入端相连,电动助力转向控制器的输出端分别和所述的助力电动机