
四旋翼飞行器原理及应用研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四旋翼飞行器原理及应用研究.docx
四旋翼飞行器原理及应用研究1.引言四旋翼飞行器,也叫做无人机,是一种特殊的飞行器,其主要原理为四个电动机驱动螺旋桨旋转从而产生上托力达到升空飞行。随着科技的不断进步和应用环境不断拓展,四旋翼飞行器在农业植保、物流配送、气象探测等方面得到广泛应用。本文先简要介绍四旋翼飞行器的原理,再着重阐述其在现代社会中的应用和前景。2.四旋翼飞行器的原理(1)结构构成四旋翼飞行器的机体结构通常由四个螺旋桨和一个控制系统组成。其四个螺旋桨互相平行,并通过固定结构与机体相连,可以通过调整旋转速度来控制飞行姿态,并在空中保持平
多旋翼飞行器原理.pdf
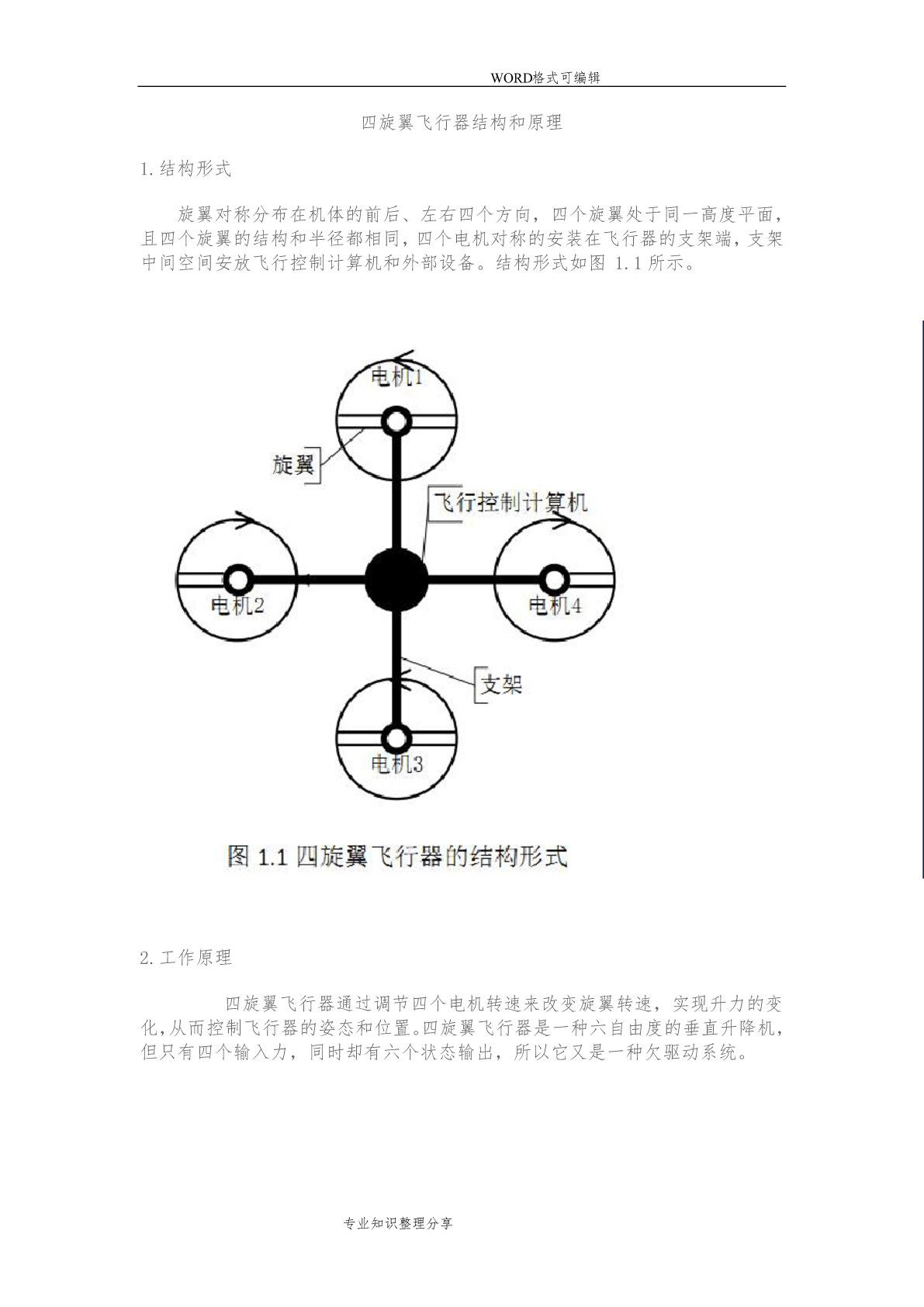
WORD格式可编辑四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。专业知识整理分享WORD格式可编辑四旋翼飞行器的电

多旋翼飞行器原理.docx
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋

基于扑旋翼原理的多翼飞行器.pdf
本发明公开了一种基于扑旋翼原理的多翼飞行器,包括中心桁架和多个扑旋翼机构;扑旋翼机构包括机架、中轴、第一旋转件、第二旋转件、翼杆、翼板、俯仰驱动杆和直线驱动组件;第一旋转件安装在机架上,翼杆的一端铰接第一旋转件,翼板安装在翼杆上,中轴安装在机架上,第二旋转件安装在中轴上,直线驱动组件驱动中轴和第二旋转件沿着中轴的轴向往复运动;俯仰驱动杆的一端铰接第二旋转件,另一端铰接翼杆;本发明通过调整不同扑旋翼机构中翼板的扑动频率可以使得不同的扑旋翼机构产生不同的升力,进而改变多翼飞行器的姿态,不但有助于提高飞行器的方

四旋翼飞行器.pdf
本发明提供了一种四旋翼飞行器,包括接收机(1)、处理器(2)、辅助电源(3)、通信串口(4)、倾角传感器(5)、高度传感器(6)、角速度传感器(7)、工控机(8)、信号输入器(9)、信号输出器(10)和多个驱动器,所述处理器(2)分别与辅助电源(3)、通信串口(4)、倾角传感器(5)、高度传感器(6)、角速度传感器(7)、信号输入器(9)以及信号输出器(10)连接。本发明提供的四旋翼飞行器,重量轻、体积小、功耗低的产品;考虑模块化、接口标准化,预留可扩展端口,增强了整体装置的可扩展性,便于升级,实现飞行器