
多旋翼飞行器原理.pdf

文库****品店

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多旋翼飞行器原理.pdf
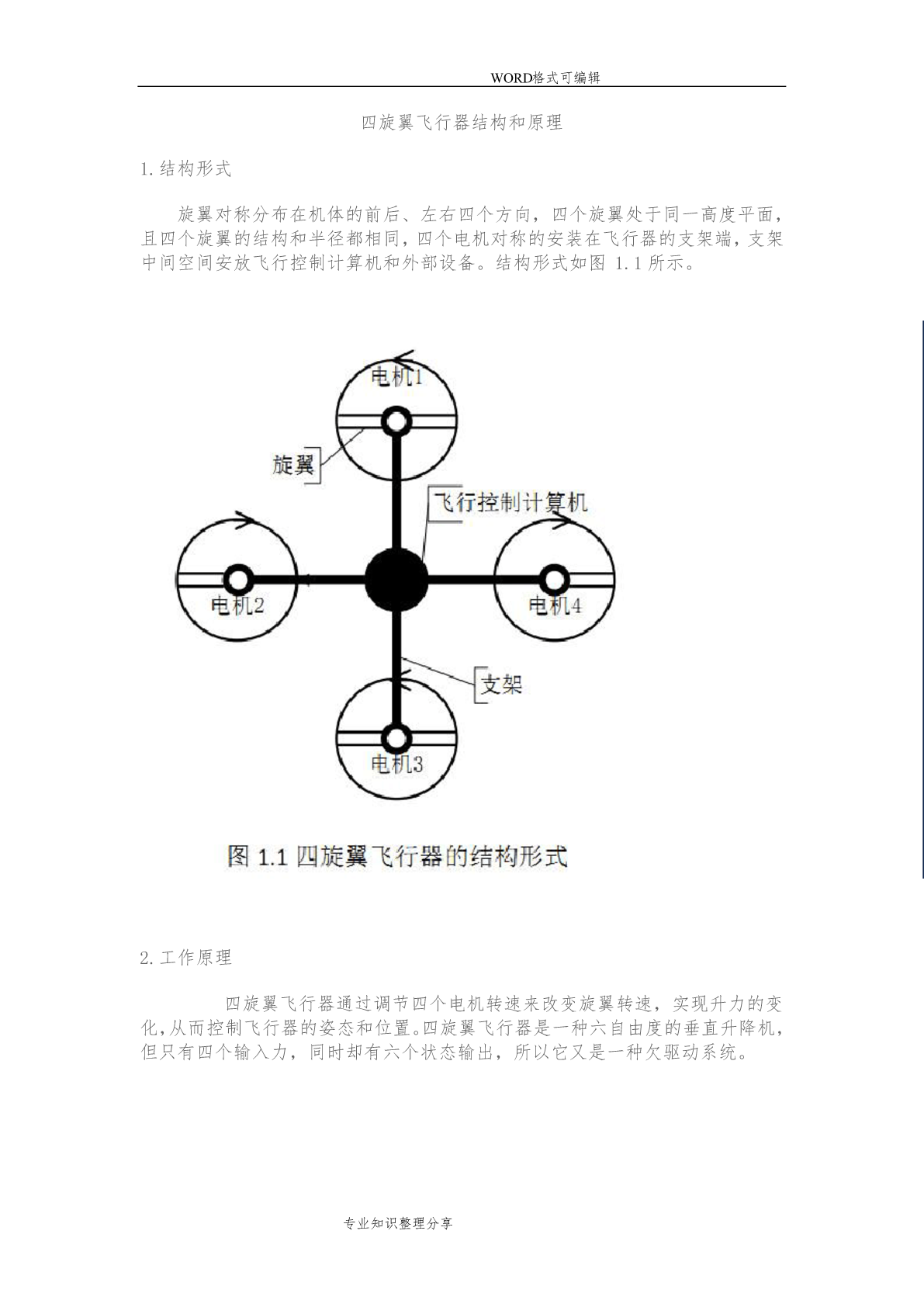
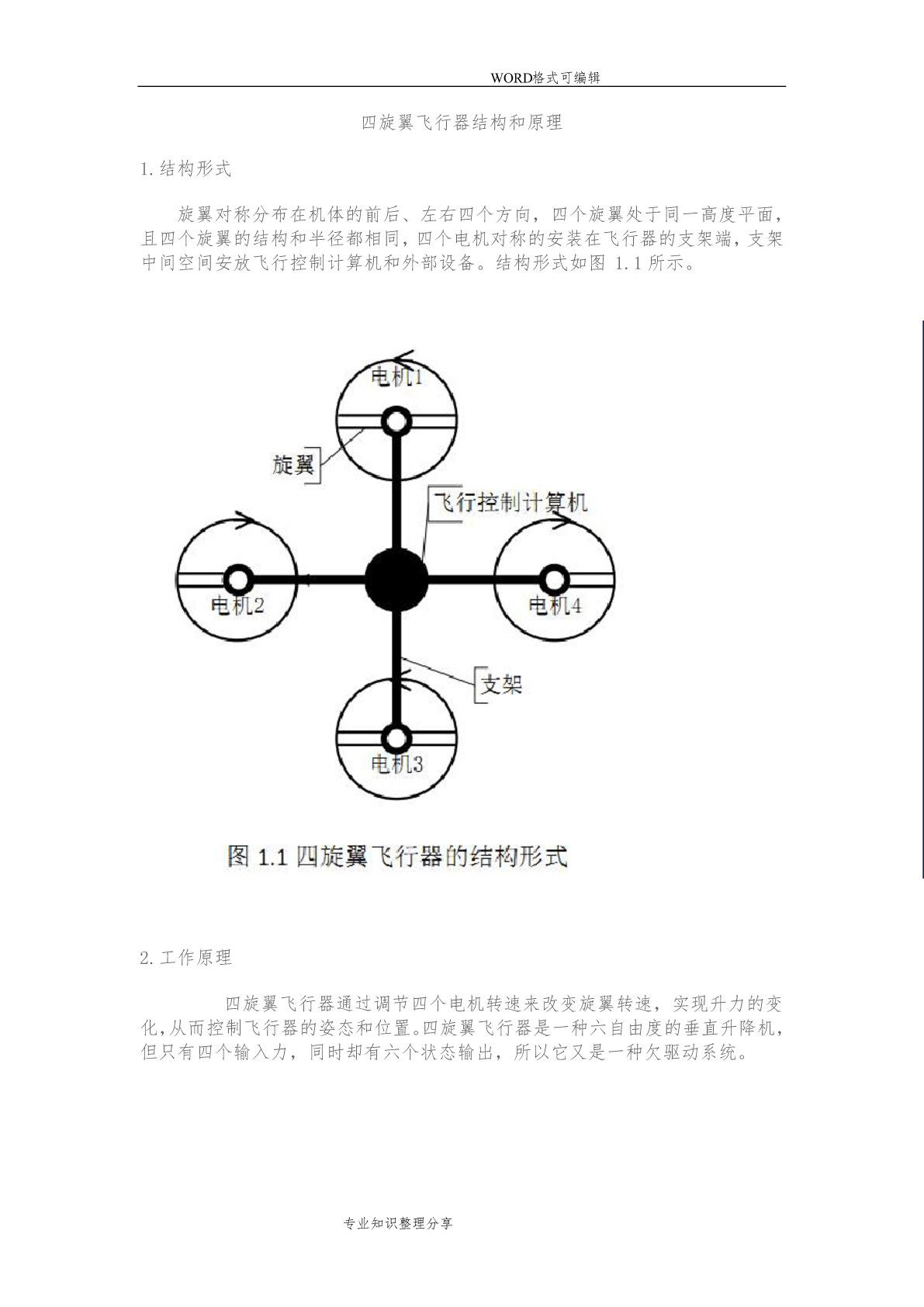
WORD格式可编辑四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。专业知识整理分享WORD格式可编辑四旋翼飞行器的电

基于扑旋翼原理的多翼飞行器.pdf
本发明公开了一种基于扑旋翼原理的多翼飞行器,包括中心桁架和多个扑旋翼机构;扑旋翼机构包括机架、中轴、第一旋转件、第二旋转件、翼杆、翼板、俯仰驱动杆和直线驱动组件;第一旋转件安装在机架上,翼杆的一端铰接第一旋转件,翼板安装在翼杆上,中轴安装在机架上,第二旋转件安装在中轴上,直线驱动组件驱动中轴和第二旋转件沿着中轴的轴向往复运动;俯仰驱动杆的一端铰接第二旋转件,另一端铰接翼杆;本发明通过调整不同扑旋翼机构中翼板的扑动频率可以使得不同的扑旋翼机构产生不同的升力,进而改变多翼飞行器的姿态,不但有助于提高飞行器的方

多旋翼飞行器.pdf
本发明提供了一种多旋翼飞行器,包括驾驶舱、蓄电池组、旋翼支架、十二个旋翼、前轮和二个后轮,所述旋翼支架包括圆形主体、六个“一”字形支架和基座,所述基座位于所述圆形主体的中心并且与所述驾驶舱的顶部固定连接,所述基座的顶部还固定有降落伞包,所述“一”字形支架的一端在所述基座固定连接,另外一端固定在所述圆形主体上,这种多旋翼飞行器结构简单,没有复杂的机械机构,利用蓄电池组作为飞机举升的动力源,十八个旋翼同时旋转,提供举升力,不仅节能环保,而且不会因为一两个旋翼或者电机出现故障就会发生事故,安全性高。

多旋翼飞行原理.docx
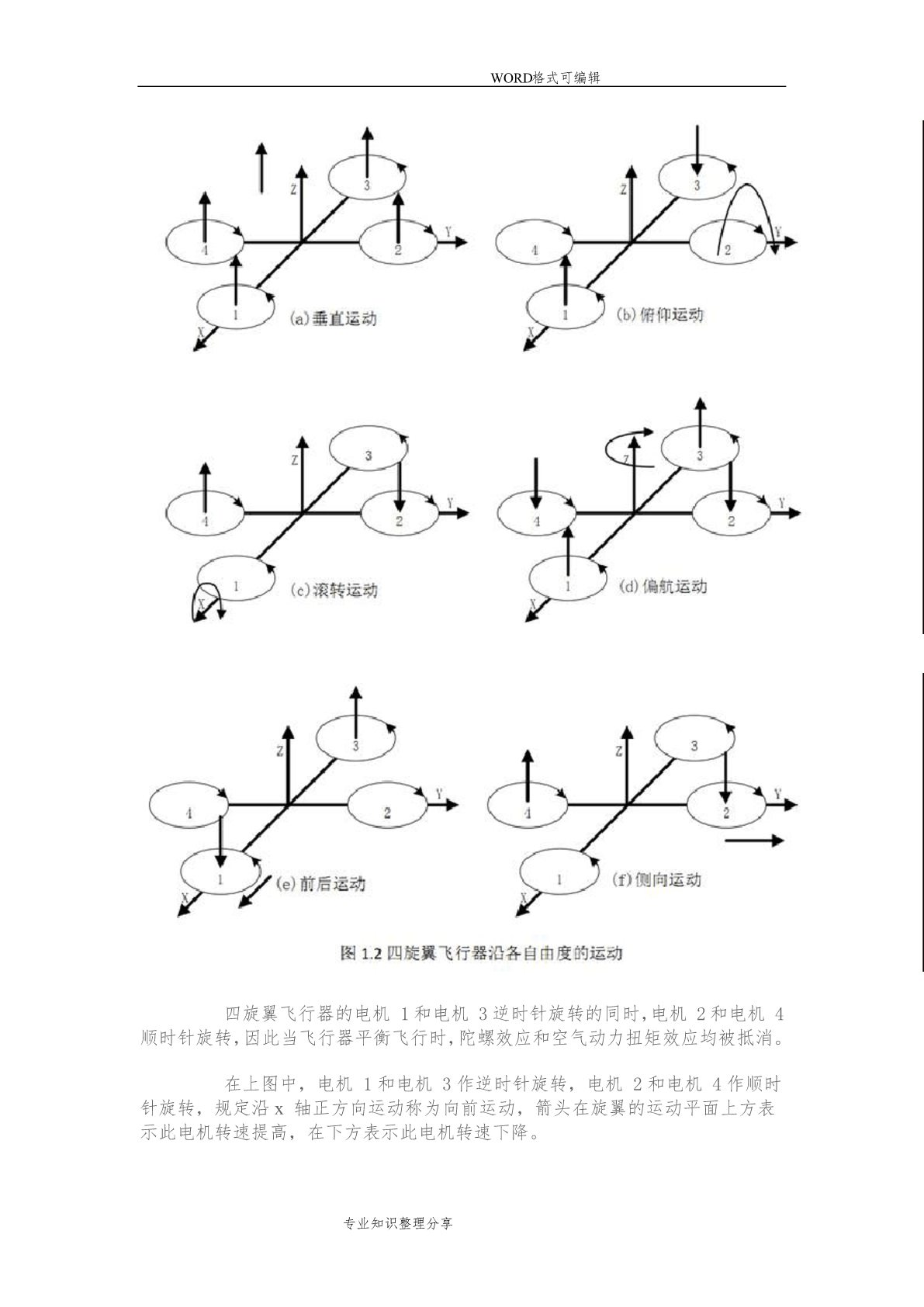
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转

可拼装多旋翼飞行器.pdf
本发明的目的是提供一种结构简单的可以拼装和拆卸的多旋翼飞行器,并且可以重复利用这种无人机飞行器的套件组装成4轴,6轴多旋翼飞行器。本飞行器提供了结构接口,可以与自己套件互相拼合,也可与乐高套件拼合以附加其他不同功能和外观特点。