
配电房轨道式自动巡检机器人控制系统设计与实现.docx

快乐****蜜蜂


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

配电房轨道式自动巡检机器人控制系统设计与实现.docx
配电房轨道式自动巡检机器人控制系统设计与实现论文题目:配电房轨道式自动巡检机器人控制系统设计与实现摘要:随着现代社会对电力设备的需求不断增加,配电房自动巡检成为了必要的工作。本论文在深入研究配电房自动巡检的基础上,设计了一种轨道式自动巡检机器人控制系统。通过对机器人的控制和导航算法的优化,实现了机器人精确、高效、安全地巡检配电房。关键词:配电房,自动巡检,机器人,控制系统,导航算法第一章:引言1.1研究背景和意义1.2国内外研究现状1.3论文结构第二章:相关技术介绍2.1配电房自动巡检技术2.2机器人导航

配电房轨道式自动巡检机器人控制系统设计与实现的任务书.docx
配电房轨道式自动巡检机器人控制系统设计与实现的任务书任务书题目:配电房轨道式自动巡检机器人控制系统设计与实现任务背景:随着电力系统的不断发展,配电房作为电能传输的重要环节,也得到了越来越多的关注。而随着配电房的不断增多和规模的扩大,传统的人工巡检已经难以满足需求,而自动化巡检系统的出现则成为了当下的热点和趋势。本项目旨在设计并实现一款配电房轨道式自动巡检机器人控制系统,通过自主巡检、故障报警等功能,实现配电设备的全方位安全监控与保护。任务内容:1.系统功能设计设计一个配电房轨道式自动巡检机器人控制系统,包

配电房巡检机器人控制系统设计与实现的开题报告.docx
配电房巡检机器人控制系统设计与实现的开题报告一.选题背景在现代工业领域,配电设备的稳定性和安全性是非常重要的。配电房是电力系统的核心部分,也是电信、银行等重要单位的基础设施之一。不仅如此,人工巡检不仅需要花费时间精力,还存在着安全隐患,如高压电、火灾等。因此,配电房巡检机器人的研发和应用成为当今热门课题。通过将机器人应用于配电房巡检中,可以实现无需人员进入配电房,有效避免高压电、火灾等安全隐患,并且可增加对配电设备的监控和维护效率,提高工作的精度和效率。二.研究目的本论文旨在设计并实现一种配电房巡检机器人

轨道式巡检机器人.pdf
本发明的目的是提供一种能够在轨道上可靠行走的轨道式巡检机器人,机架上设置有信号采集摄录设备和信号收发设备,机架及附件总成的铅垂向对称面的两侧对称设置行走轮及行走轮的下方设置顶紧轮,行走轮和顶紧轮的轮轴芯平行且行走轮和顶紧轮之间的轮间距与置于其间的┸形轨道A的翼板厚吻合,位于┸形轨道A的腹板两侧的行走轮、顶紧轮同芯布置,行走轮、顶紧轮的轮芯与机架及附件总成的铅垂向对称面垂直,动力单元行驱动行走轮转动。上述方案中,┸形轨道A的腹板夹置于行走轮和顶紧轮之间,有效地避免了机器人受外力影响发生抖动及其上坡打滑的现象
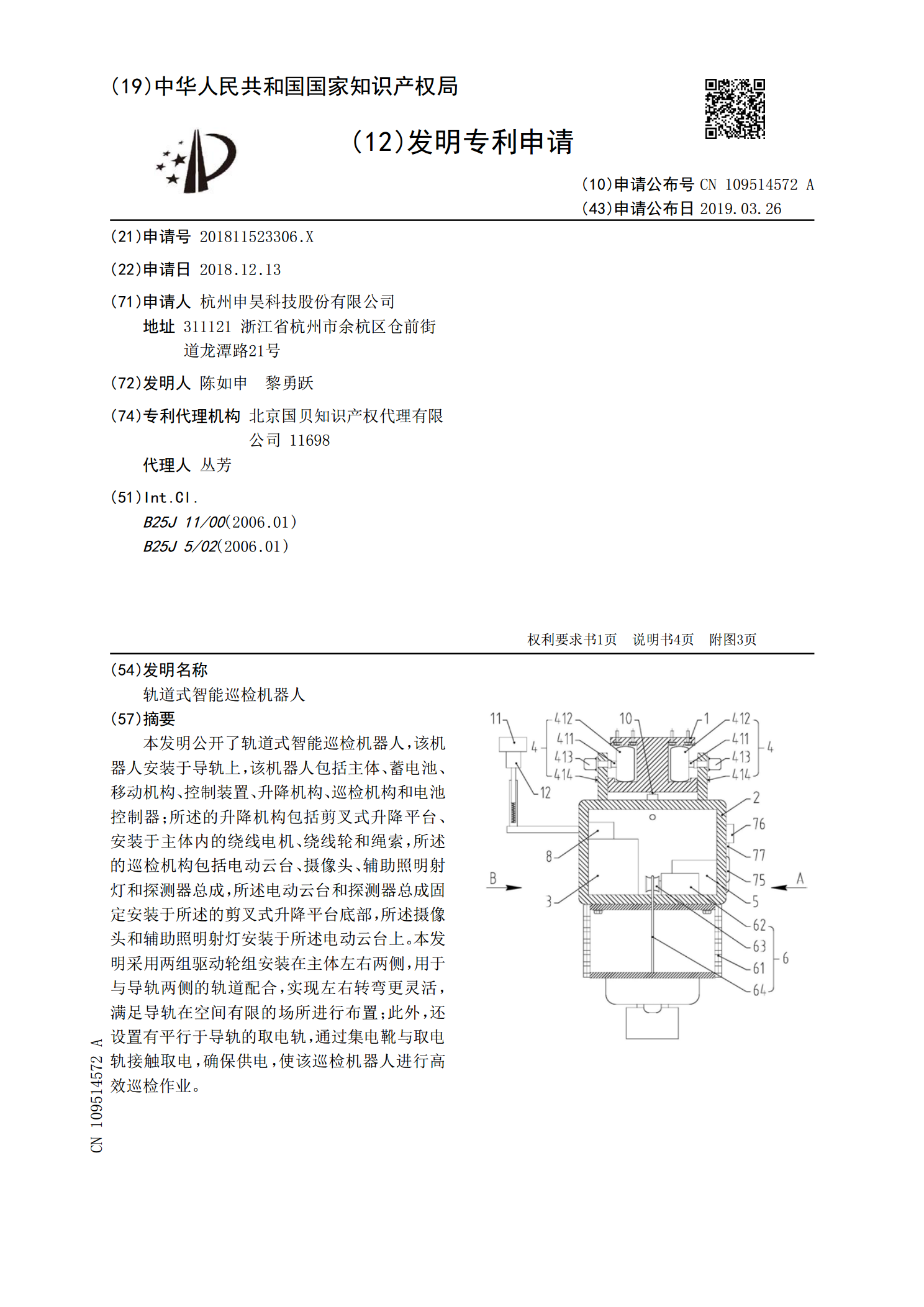
轨道式智能巡检机器人.pdf
本发明公开了轨道式智能巡检机器人,该机器人安装于导轨上,该机器人包括主体、蓄电池、移动机构、控制装置、升降机构、巡检机构和电池控制器;所述的升降机构包括剪叉式升降平台、安装于主体内的绕线电机、绕线轮和绳索,所述的巡检机构包括电动云台、摄像头、辅助照明射灯和探测器总成,所述电动云台和探测器总成固定安装于所述的剪叉式升降平台底部,所述摄像头和辅助照明射灯安装于所述电动云台上。本发明采用两组驱动轮组安装在主体左右两侧,用于与导轨两侧的轨道配合,实现左右转弯更灵活,满足导轨在空间有限的场所进行布置;此外,还设置有