
多AGV系统的组合导航控制与调度方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多AGV系统的组合导航控制与调度方法研究.docx
多AGV系统的组合导航控制与调度方法研究标题:多AGV系统的组合导航控制与调度方法研究摘要:随着自动化技术和物联网的发展,自动导引车(AutomatedGuidedVehicle,AGV)系统在物流和制造业中得到广泛应用。而针对多AGV系统的组合导航控制与调度方法的研究,可以提高AGV系统的整体性能和效率。本文综合分析了多AGV系统的导航、控制和调度等关键技术,提出了一种基于智能算法的综合导航控制与调度方法,通过优化路径规划和任务分配,实现AGV系统的高效协同运行。关键词:多AGV系统、导航、控制、调度、

多AGV系统的组合导航控制与调度方法研究的开题报告.docx
多AGV系统的组合导航控制与调度方法研究的开题报告一、选题背景及意义随着自动化技术的不断发展,无人驾驶技术也得到了迅猛的发展。AGV(AutomaticGuidedVehicle)自动导航小车被视为是智能制造与物流的重要装备之一,它可以为生产厂家和物流公司提高效率、降低成本,提高安全性等多方面提供帮助和支持。随着行业的发展,单一AGV已无法满足生产和物流的需求,因此多AGV系统开始被广泛采用。多AGV系统不仅仅是硬件数量的提升,它更像是一个系统集成问题,要考虑到导航、控制和调度等多个因素。其中,多AGV系

多AGV系统的组合导航控制与调度方法研究的任务书.docx
多AGV系统的组合导航控制与调度方法研究的任务书任务书任务名称:多AGV系统的组合导航控制与调度方法研究任务背景:随着工业自动化水平的不断提高,AGV系统在物流自动化领域得到了广泛的应用。在一些大型工厂或仓库中,由于周围环境和物流流程的复杂性,常常需要多个AGV系统同时协同工作,完成物品的搬运、传递等任务。因此,多AGV系统的组合导航控制与调度方法研究具有重要的实用价值。任务目标:本次任务旨在深入研究多AGV系统的组合导航控制与调度方法,主要目标如下:1.分析现有多AGV系统组合导航控制与调度方法研究的优

多AGV系统的路径规划与调度算法的研究.docx
多AGV系统的路径规划与调度算法的研究一、概述随着工业0和物流自动化的快速发展,自动导引车(AGV)在仓储、制造、运输等领域的应用越来越广泛。多AGV系统作为其中的重要组成部分,其性能直接影响到整个物流系统的效率和成本。路径规划与调度算法作为多AGV系统的核心技术之一,对于提高系统的运行效率、减少冲突和堵塞、优化资源配置等方面具有重要意义。传统的路径规划与调度算法往往只考虑单一的AGV或简单的多AGV场景,难以适应复杂多变的生产环境和任务需求。研究适用于多AGV系统的路径规划与调度算法具有重要的理论价值和
导航系统、导航控制方法及装置、控制器、AGV小车.pdf
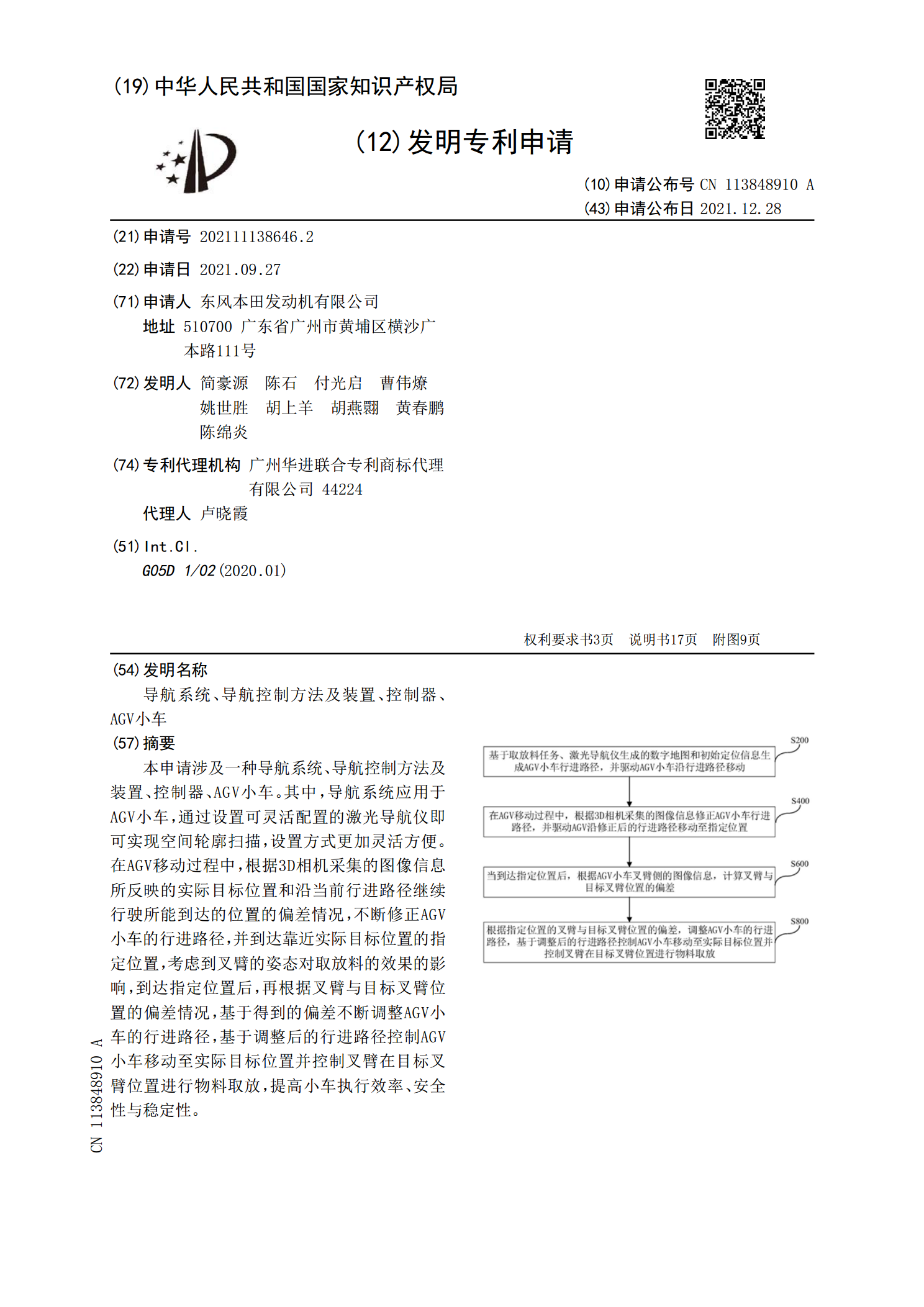
本申请涉及一种导航系统、导航控制方法及装置、控制器、AGV小车。其中,导航系统应用于AGV小车,通过设置可灵活配置的激光导航仪即可实现空间轮廓扫描,设置方式更加灵活方便。在AGV移动过程中,根据3D相机采集的图像信息所反映的实际目标位置和沿当前行进路径继续行驶所能到达的位置的偏差情况,不断修正AGV小车的行进路径,并到达靠近实际目标位置的指定位置,考虑到叉臂的姿态对取放料的效果的影响,到达指定位置后,再根据叉臂与目标叉臂位置的偏差情况,基于得到的偏差不断调整AGV小车的行进路径,基于调整后的行进路径控制A