
主动前轮转向技术发展综述PPT课件.pptx

lj****88


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
主动前轮转向技术发展综述PPT课件.pptx
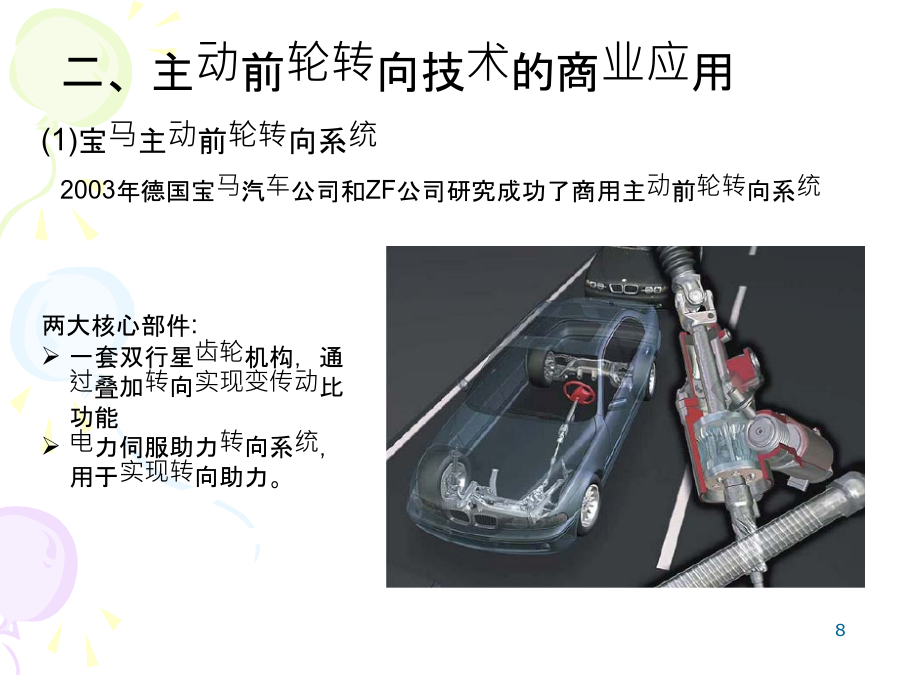
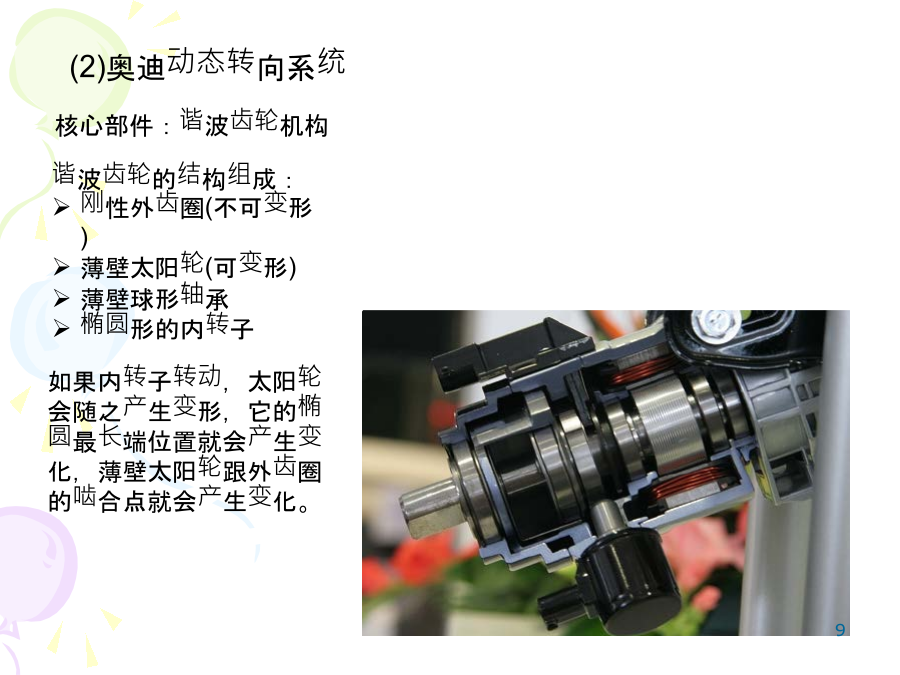
主动前轮转向技术发展综述姓名:班级:学号:指导老师:一主动前轮转向技术概述二主动前轮转向技术的商业应用三主动前轮转向技术的学术研究四总结与展望一、技术概述主动前轮转向系统的控制目标:主动避障(车道保持)横摆稳定性控制可变传动比控制二、主动前轮转向技术的商业应用(2)奥迪动态转向系统动态转向系统可以根据车速实时改变传动比和助力的大小。与传感器、车身稳定程序控制系统等相结合,在出现转向过度与转向不足的时候,或者是单侧车轮碾压湿滑路面,导致车身即将侧滑失控的时候,动态转向系统能自动对转向施加力矩,在一定范围内自

汽车主动前轮转向系统研究综述报告.docx
汽车主动前轮转向系统研究综述报告随着科技的发展,汽车的智能化水平不断提高。主动前轮转向系统作为一种辅助性的智能化技术,得到了越来越广泛的应用。本文将对主动前轮转向系统的研究现状进行综述,包括技术原理、应用领域、发展趋势等方面。一、技术原理主动前轮转向系统是利用车辆电子控制单元(ECU)配合传感器、执行器等部件,通过控制机构达到对车辆前轮转向的控制。其中控制机构主要包括电动全轮转向机构和电液-机械全轮转向机构两种。1.电动全轮转向机构电动全轮转向机构是指通过电动机控制转向机构实现对车辆前、后轮的转向。其控制

汽车主动前轮转向系统研究综述报告.pptx
汽车主动前轮转向系统研究综述目录添加目录项标题汽车主动前轮转向系统概述主动前轮转向系统的定义主动前轮转向系统的组成和工作原理主动前轮转向系统的优缺点汽车主动前轮转向系统的研究历程主动前轮转向系统的起源和发展主动前轮转向系统的研究现状主动前轮转向系统的未来发展趋势汽车主动前轮转向系统的关键技术传感器技术控制器设计执行机构系统集成与优化汽车主动前轮转向系统的应用实例主动前轮转向系统在商用车上的应用主动前轮转向系统在轿车上的应用主动前轮转向系统在SUV上的应用主动前轮转向系统在跑车上的应用汽车主动前轮转向系统的
汽车前轮主动转向系统的主动转向传动装置.pdf
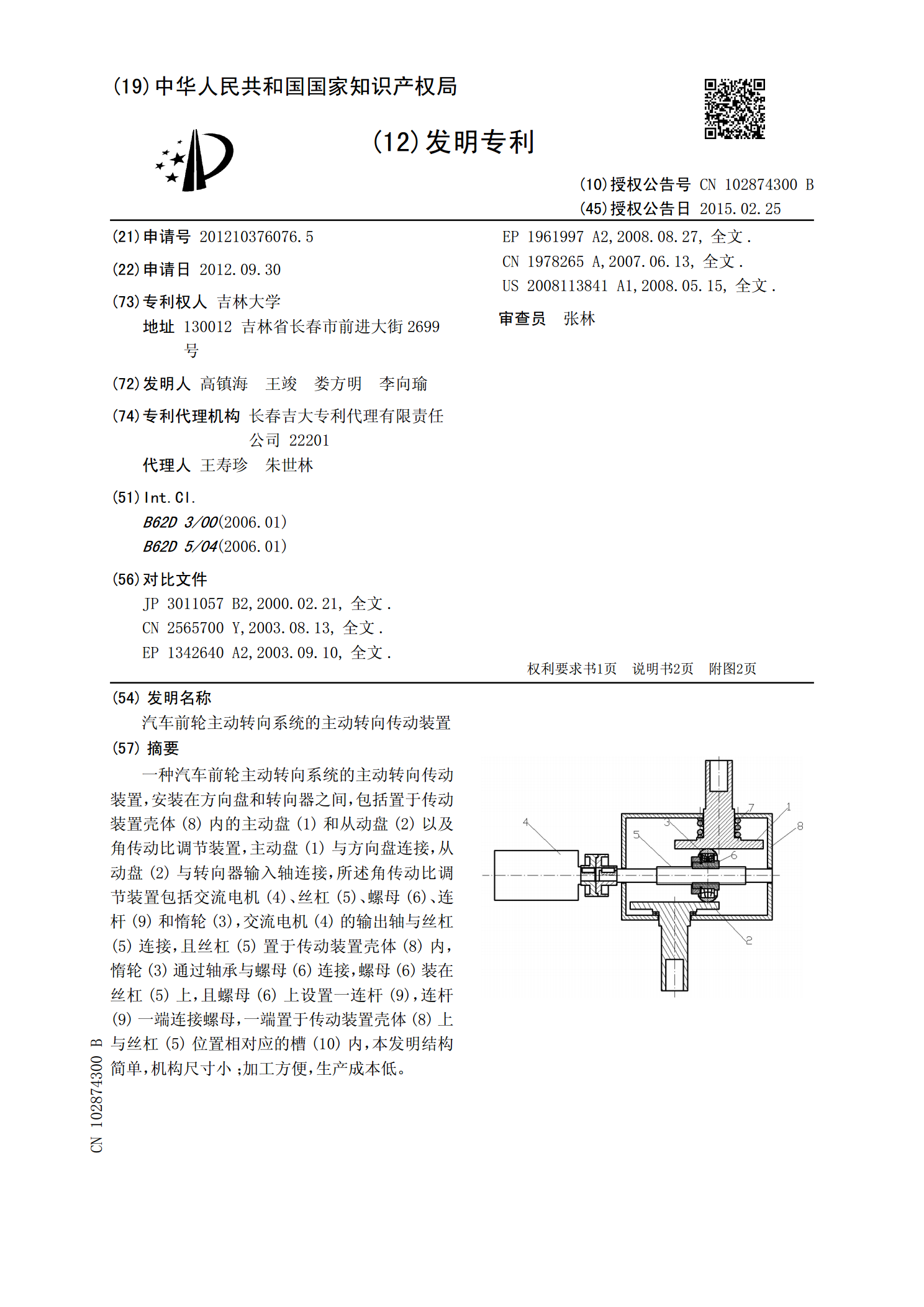
一种汽车前轮主动转向系统的主动转向传动装置,安装在方向盘和转向器之间,包括置于传动装置壳体(8)内的主动盘(1)和从动盘(2)以及角传动比调节装置,主动盘(1)与方向盘连接,从动盘(2)与转向器输入轴连接,所述角传动比调节装置包括交流电机(4)、丝杠(5)、螺母(6)、连杆(9)和惰轮(3),交流电机(4)的输出轴与丝杠(5)连接,且丝杠(5)置于传动装置壳体(8)内,惰轮(3)通过轴承与螺母(6)连接,螺母(6)装在丝杠(5)上,且螺母(6)上设置一连杆(9),连杆(9)一端连接螺母,一端置于传动装置壳
用于车辆的主动前轮转向系统.pdf
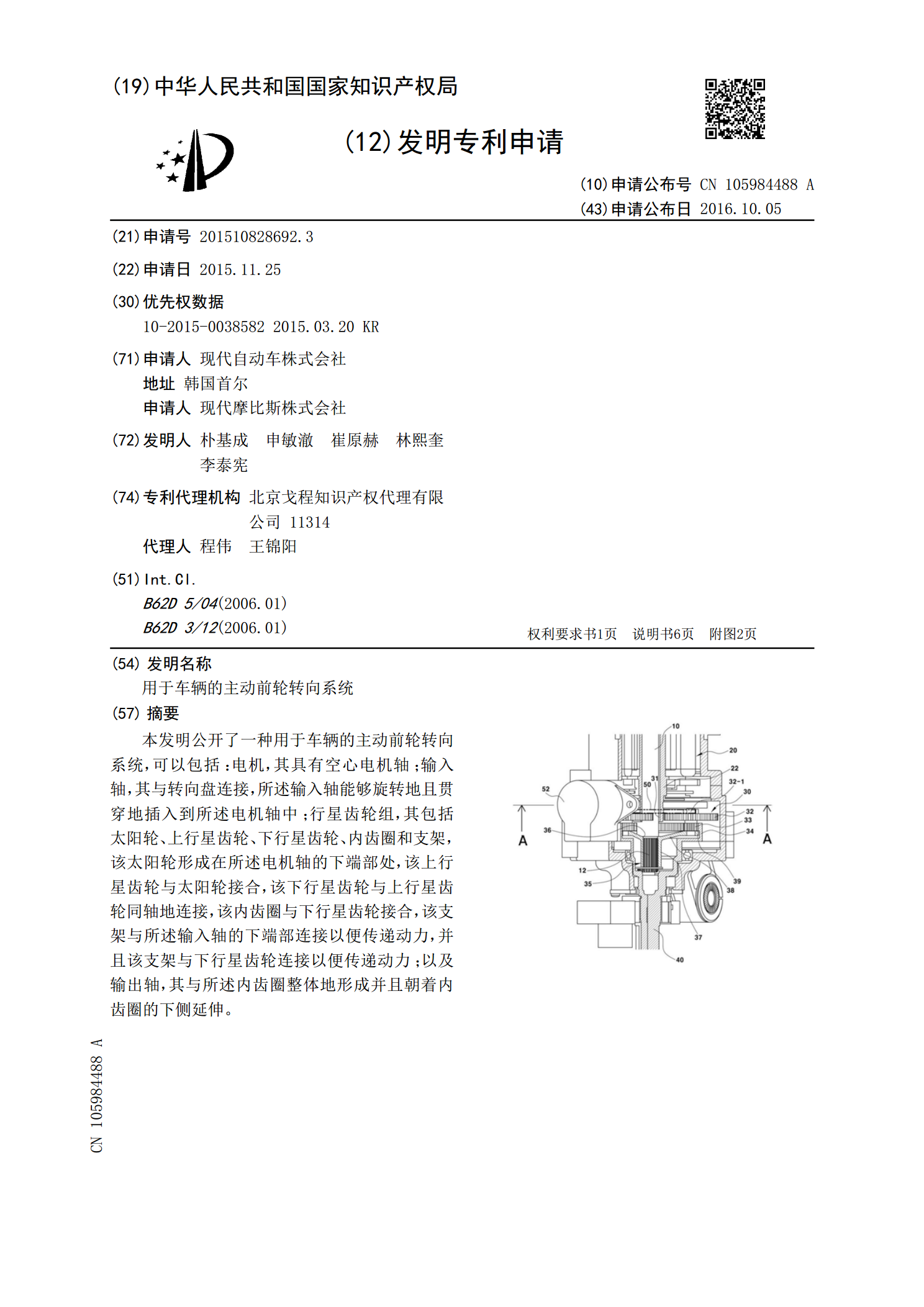
本发明公开了一种用于车辆的主动前轮转向系统,可以包括:电机,其具有空心电机轴;输入轴,其与转向盘连接,所述输入轴能够旋转地且贯穿地插入到所述电机轴中;行星齿轮组,其包括太阳轮、上行星齿轮、下行星齿轮、内齿圈和支架,该太阳轮形成在所述电机轴的下端部处,该上行星齿轮与太阳轮接合,该下行星齿轮与上行星齿轮同轴地连接,该内齿圈与下行星齿轮接合,该支架与所述输入轴的下端部连接以便传递动力,并且该支架与下行星齿轮连接以便传递动力;以及输出轴,其与所述内齿圈整体地形成并且朝着内齿圈的下侧延伸。