
PID参数整定.ppt

lj****88


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PID参数整定.ppt
如何整定控制系统PID参数控制系统常见概念9:什么是放大倍数:比例度的倒数就是放大倍数(Kp=1/&),输入的相对变化量与输出相对变化量之比(积分时间和微分时间均未起作用)。10:什么是积分速度Ti:积分时间的倒数称为积分速度,积分时间单位一般为秒(S)。11:什么是微分时间Td:是描述微分作用强弱的一个物理量。调节器的输出表达式典型的控制系统的过度过程曲线3:等幅振荡过渡过程曲线4:发散振荡过度过程曲线调节作用强弱的判断过渡过程曲线的几个概念经验共享、仅供参考

PID参数整定.ppt
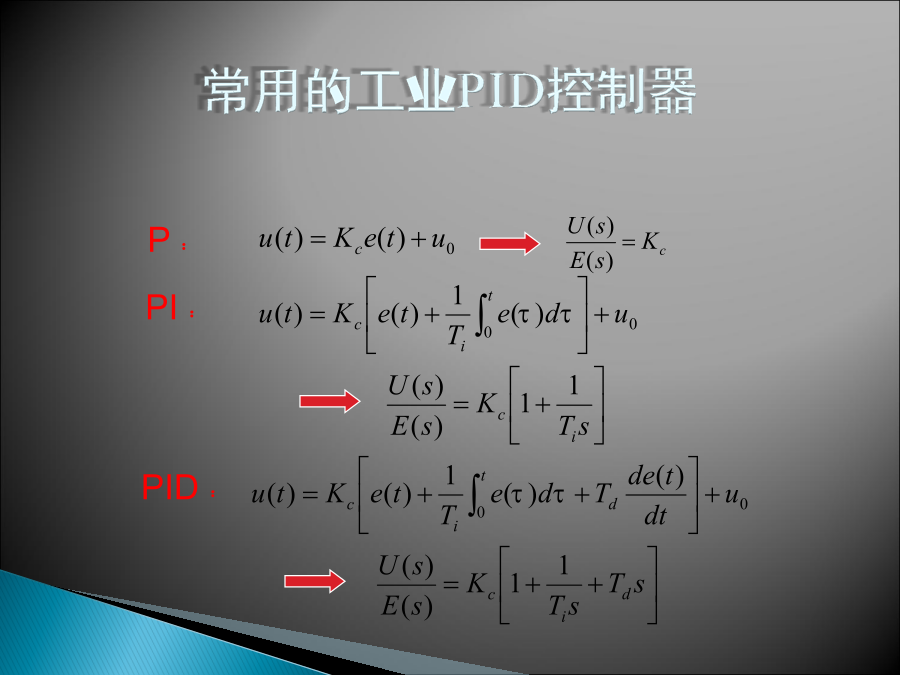
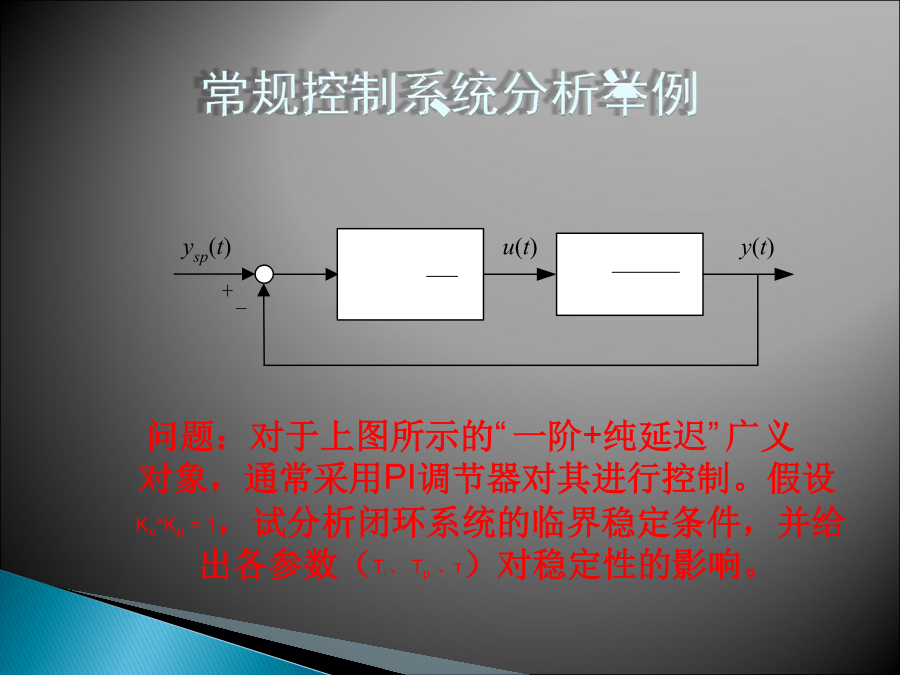
PID控制器的参数整定常用的工业PID控制器Kc对过渡过程的影响增益Kc的增大,使系统的调节作用增强,但稳定性下降(当系统稳定时,调节频率提高、最大偏差下降);Ti对系统性能的影响积分作用的增强(即Ti下降),使系统消除余差的速度增强,但稳定性下降;Td对系统性能的影响微分作用的增强(即Td增大),从理论上讲使系统的超前作用增强,稳定性得到加强,但高频噪声起放大作用。因而,微分作用不适合于测量噪声较大的对象。工业PID控制器的选择常规控制系统分析举例PID工程整定法1-经验法工程整定法2-临界比例度法工程

PID参数整定.ppt
电厂自动控制第三章热工自动调节系统的分析与整定(一)目录3.1热工对象的动态特性及调节系统性能指标有自平衡能力的对象无自平衡能力的对象建立热工过程属性模型的方法测试法建模的具体步骤测试法建模的具体步骤测试法建模的具体步骤测试法建模的具体步骤2.确定传递函数参数的方法两点法两点法两点法两点法两点法3.1.2热工调节系统的性能指标3.1.2热工调节系统的性能指标3.2三种基本调节规律调节作用分析简单控制系统的例子比例调节(P调节)比例调节(P调节)比例调节举例比例调节参数变化结果积分调节作用积分调节举例积分调

PID参数整定0.ppt
PID控制器的参数整定常用的工业PID控制器Kc对过渡过程的影响增益Kc的增大,使系统的调节作用增强,但稳定性下降(当系统稳定时,调节频率提高、最大偏差下降);Ti对系统性能的影响积分作用的增强(即Ti下降),使系统消除余差的速度增强,但稳定性下降;Td对系统性能的影响微分作用的增强(即Td增大),从理论上讲使系统的超前作用增强,稳定性得到加强,但高频噪声起放大作用。因而,微分作用不适合于测量噪声较大的对象。工业PID控制器的选择常规控制系统分析举例PID工程整定法1-经验法工程整定法2-临界比例度法工程

PID参数整定方法.doc
PID参数整定方法PID参数整定方法3PID参数整定方法摘要PID控制器现在仍然是应用最广泛的工业控制器,其关键在于对PID参数的优化整定,而采用常规的手工整定方法已经难以满足要求,目前需要解决对PID参数的高效优化问题。本论文首先介绍了PID控制方法和常规PID参数整定方法,编程实现了数字PID控制器和基于遗传算法的参数自整定程序,然后将遗传算法用于不同的被控对象进行PID参数的整定及优化,为了对比控制效果,应用MATLAB软件进行了仿真验证,并用仿真曲线进行直观的对比。结果表明遗传算法能