
基于轮廓和边缘的空间非合作目标视觉跟踪.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于轮廓和边缘的空间非合作目标视觉跟踪.docx
基于轮廓和边缘的空间非合作目标视觉跟踪摘要近年来,目标视觉跟踪技术在姿态估计、行为分析、智能监控等领域发挥着重要的作用。然而,在追踪非合作目标时,由于非合作目标的动态性和复杂程度,传统的基于模型的跟踪方法往往难以成功追踪目标。为此,本文提出了一种基于轮廓和边缘的空间非合作目标视觉跟踪方法。该方法利用轮廓和边缘进行特征提取,并采用Kalman滤波器进行目标状态估计。实验结果表明,该方法能够有效追踪非合作目标并具有较高的准确性和鲁棒性。关键词:目标视觉跟踪;非合作目标;轮廓;边缘;Kalman滤波器;准确性;
基于视觉的非合作空间目标三维姿态估计方法.pptx
汇报人:/目录0102定义与意义国内外研究现状算法流程与实现难点03非合作空间目标的特点姿态估计的难点分析解决难点的方法与策略04图像预处理特征提取与匹配三维重建与姿态估计实验验证与结果分析05算法优化方向应用拓展领域未来发展趋势与挑战06研究成果总结对未来研究的建议与展望汇报人:

基于分割的空间目标视觉跟踪方法.pdf
本发明公开了一种基于分割的空间目标视觉跟踪方法,该方法包括:S1,在首帧,通过矩形框选择空间目标区域,对目标区域初始化目标与背景图像特征,得到目标剪影区域。S2,在当前帧,根据目标和背景图像特征,通过剪影跟踪,得到当前帧的目标剪影区域;S3,根据当前帧的目标剪影区域,在线学习目标与背景图像特征。S4,重复步骤S2和步骤S3,得到空间目标在视频图像的区域信息。本发明的基于分割的空间目标视觉跟踪方法,无需首帧图像标记空间目标轮廓,只需首帧图像标记空间目标矩形区域即可完成在轨服务、交会对接、相对导航等过程中空间
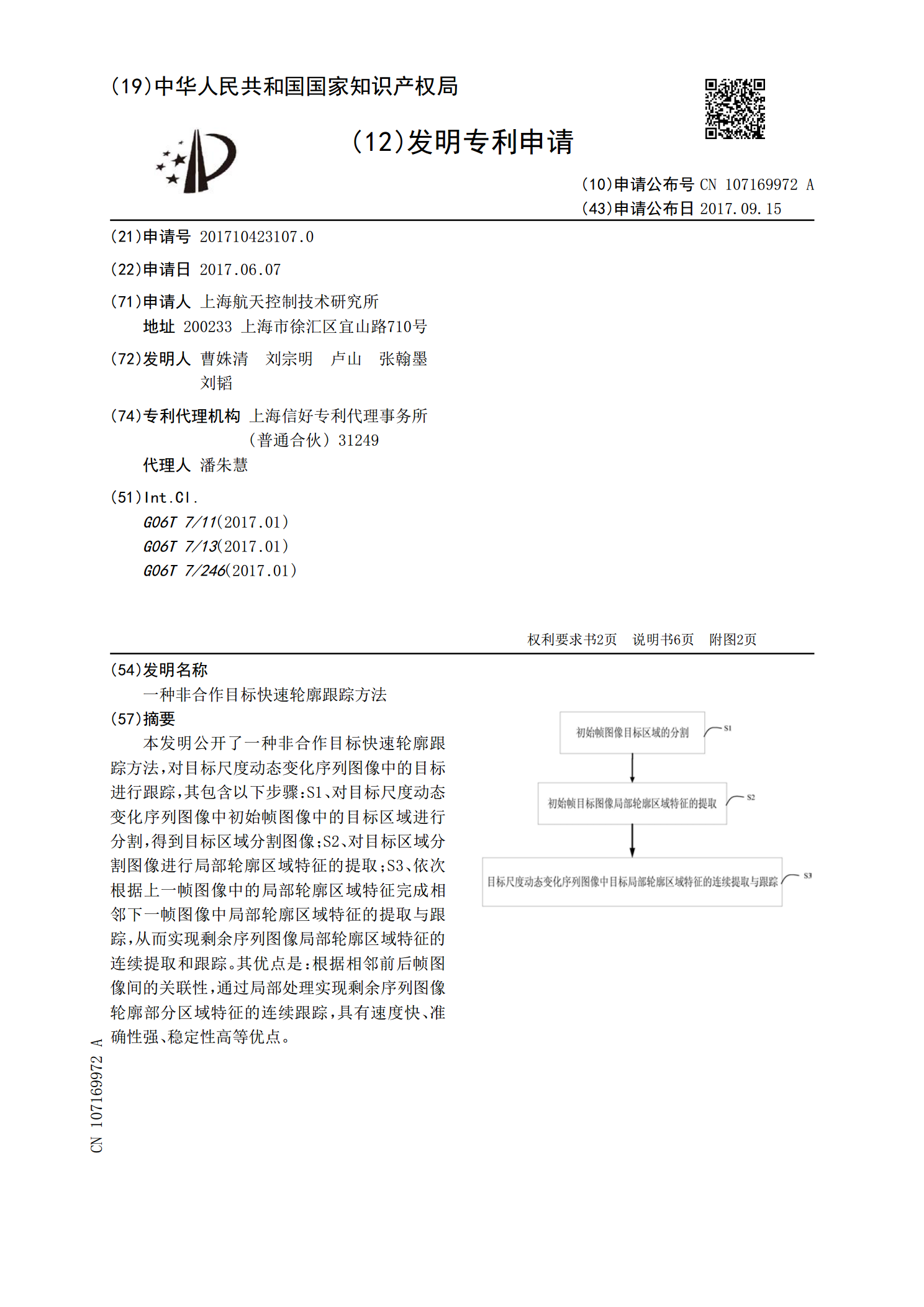
一种非合作目标快速轮廓跟踪方法.pdf
本发明公开了一种非合作目标快速轮廓跟踪方法,对目标尺度动态变化序列图像中的目标进行跟踪,其包含以下步骤:S1、对目标尺度动态变化序列图像中初始帧图像中的目标区域进行分割,得到目标区域分割图像;S2、对目标区域分割图像进行局部轮廓区域特征的提取;S3、依次根据上一帧图像中的局部轮廓区域特征完成相邻下一帧图像中局部轮廓区域特征的提取与跟踪,从而实现剩余序列图像局部轮廓区域特征的连续提取和跟踪。其优点是:根据相邻前后帧图像间的关联性,通过局部处理实现剩余序列图像轮廓部分区域特征的连续跟踪,具有速度快、准确性强、
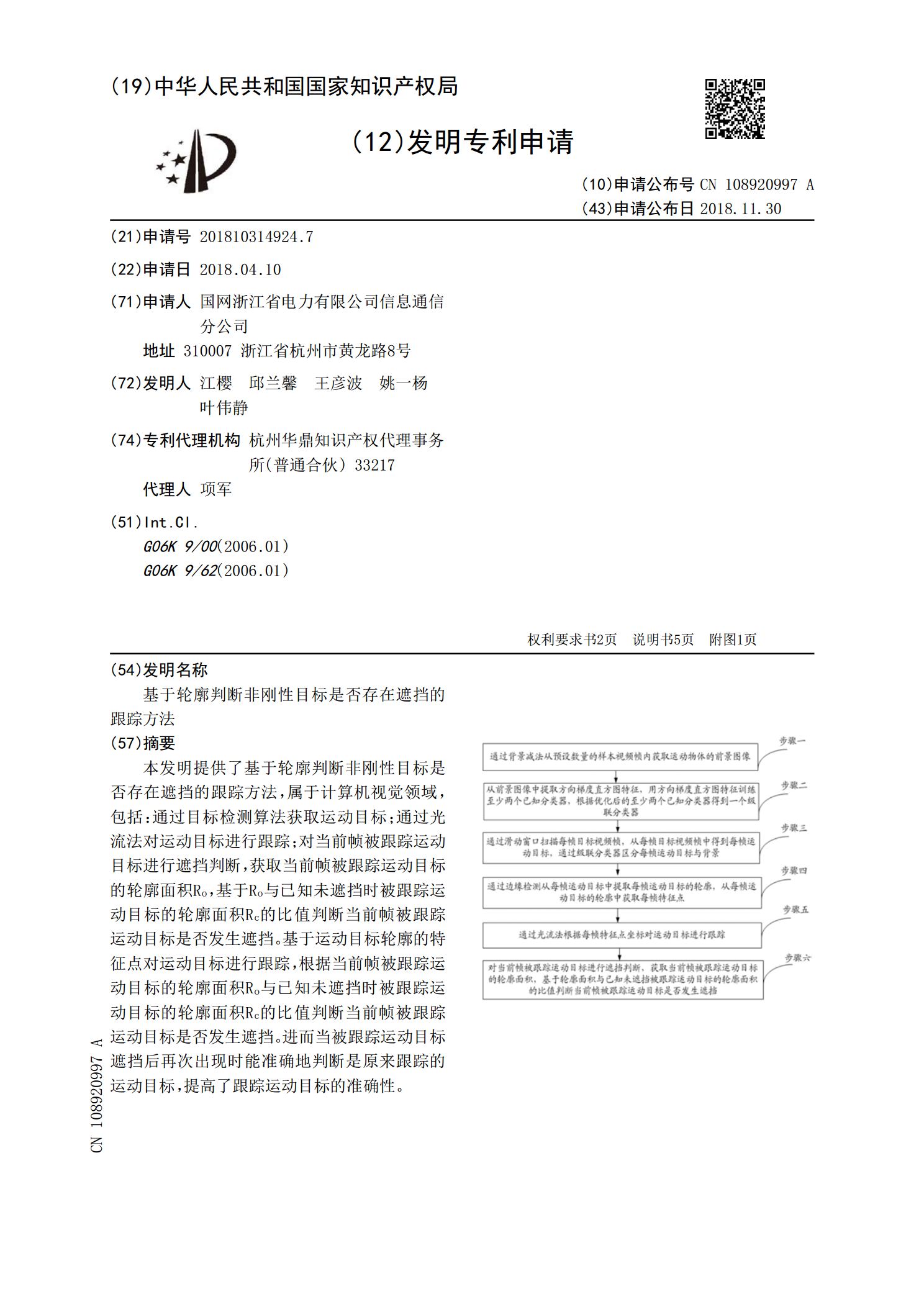
基于轮廓判断非刚性目标是否存在遮挡的跟踪方法.pdf
本发明提供了基于轮廓判断非刚性目标是否存在遮挡的跟踪方法,属于计算机视觉领域,包括:通过目标检测算法获取运动目标;通过光流法对运动目标进行跟踪;对当前帧被跟踪运动目标进行遮挡判断,获取当前帧被跟踪运动目标的轮廓面积R