
一种非合作目标快速轮廓跟踪方法.pdf

努力****南绿

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非合作目标快速轮廓跟踪方法.pdf
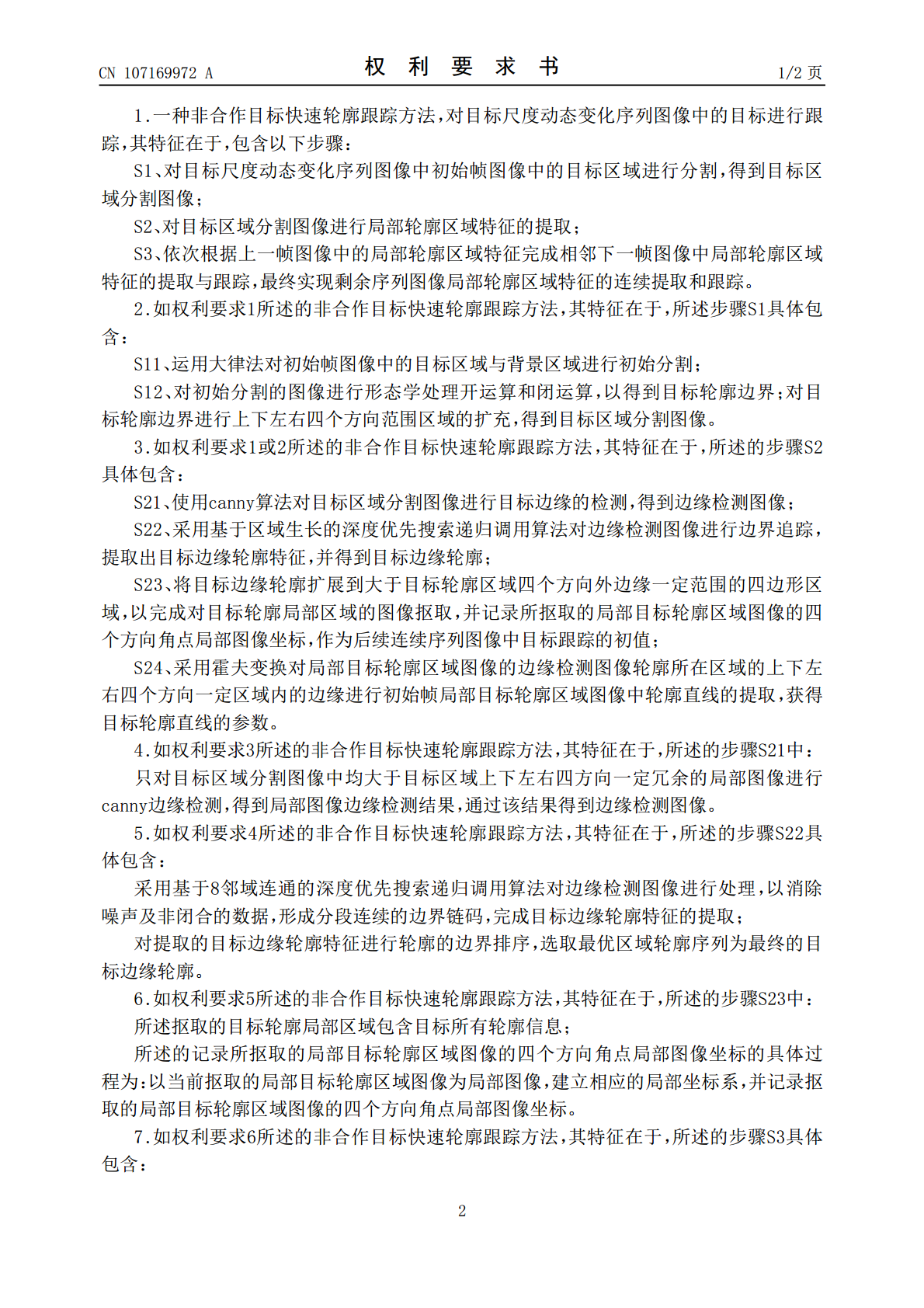
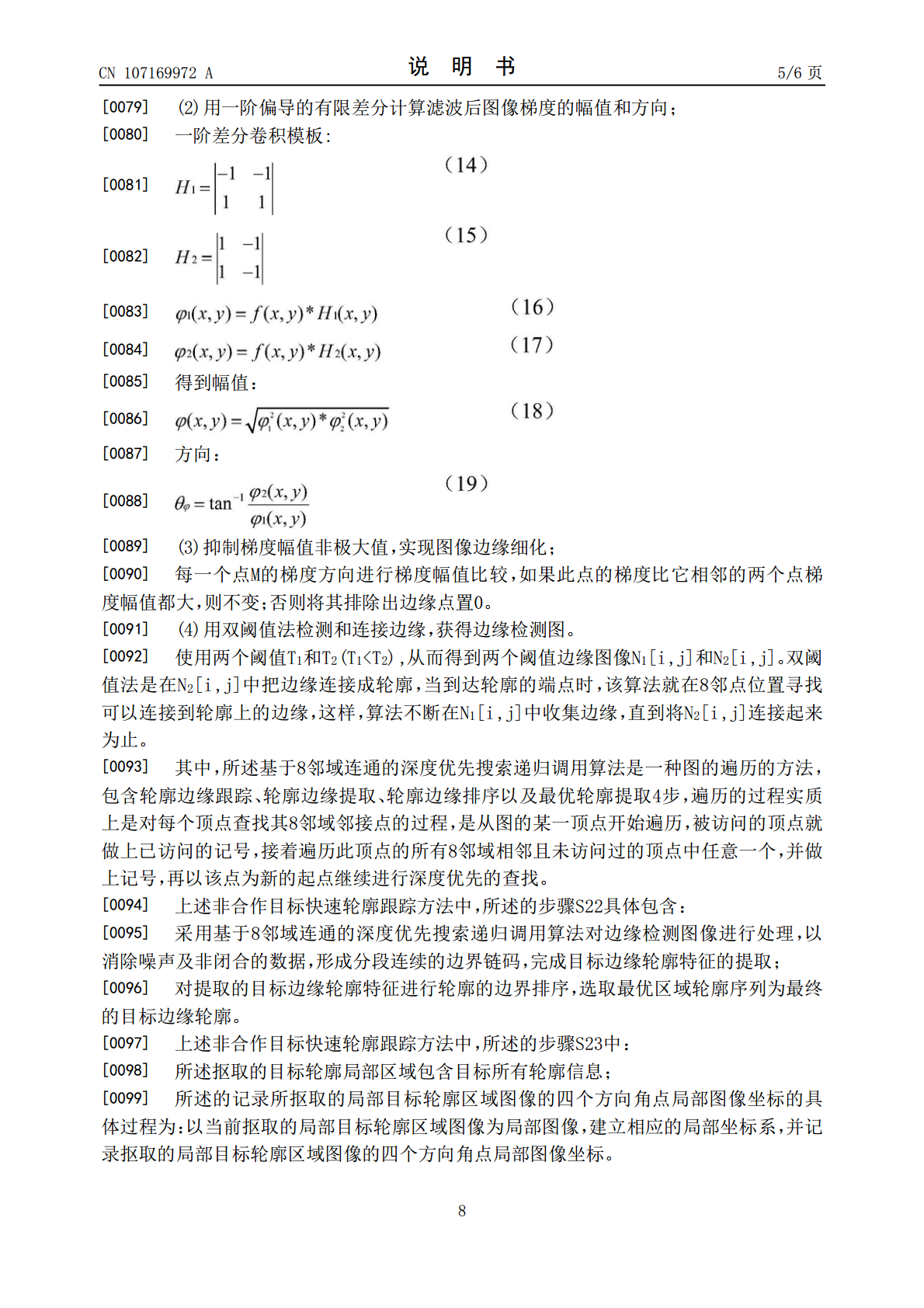
本发明公开了一种非合作目标快速轮廓跟踪方法,对目标尺度动态变化序列图像中的目标进行跟踪,其包含以下步骤:S1、对目标尺度动态变化序列图像中初始帧图像中的目标区域进行分割,得到目标区域分割图像;S2、对目标区域分割图像进行局部轮廓区域特征的提取;S3、依次根据上一帧图像中的局部轮廓区域特征完成相邻下一帧图像中局部轮廓区域特征的提取与跟踪,从而实现剩余序列图像局部轮廓区域特征的连续提取和跟踪。其优点是:根据相邻前后帧图像间的关联性,通过局部处理实现剩余序列图像轮廓部分区域特征的连续跟踪,具有速度快、准确性强、

基于轮廓和边缘的空间非合作目标视觉跟踪.docx
基于轮廓和边缘的空间非合作目标视觉跟踪摘要近年来,目标视觉跟踪技术在姿态估计、行为分析、智能监控等领域发挥着重要的作用。然而,在追踪非合作目标时,由于非合作目标的动态性和复杂程度,传统的基于模型的跟踪方法往往难以成功追踪目标。为此,本文提出了一种基于轮廓和边缘的空间非合作目标视觉跟踪方法。该方法利用轮廓和边缘进行特征提取,并采用Kalman滤波器进行目标状态估计。实验结果表明,该方法能够有效追踪非合作目标并具有较高的准确性和鲁棒性。关键词:目标视觉跟踪;非合作目标;轮廓;边缘;Kalman滤波器;准确性;
基于轮廓判断非刚性目标是否存在遮挡的跟踪方法.pdf
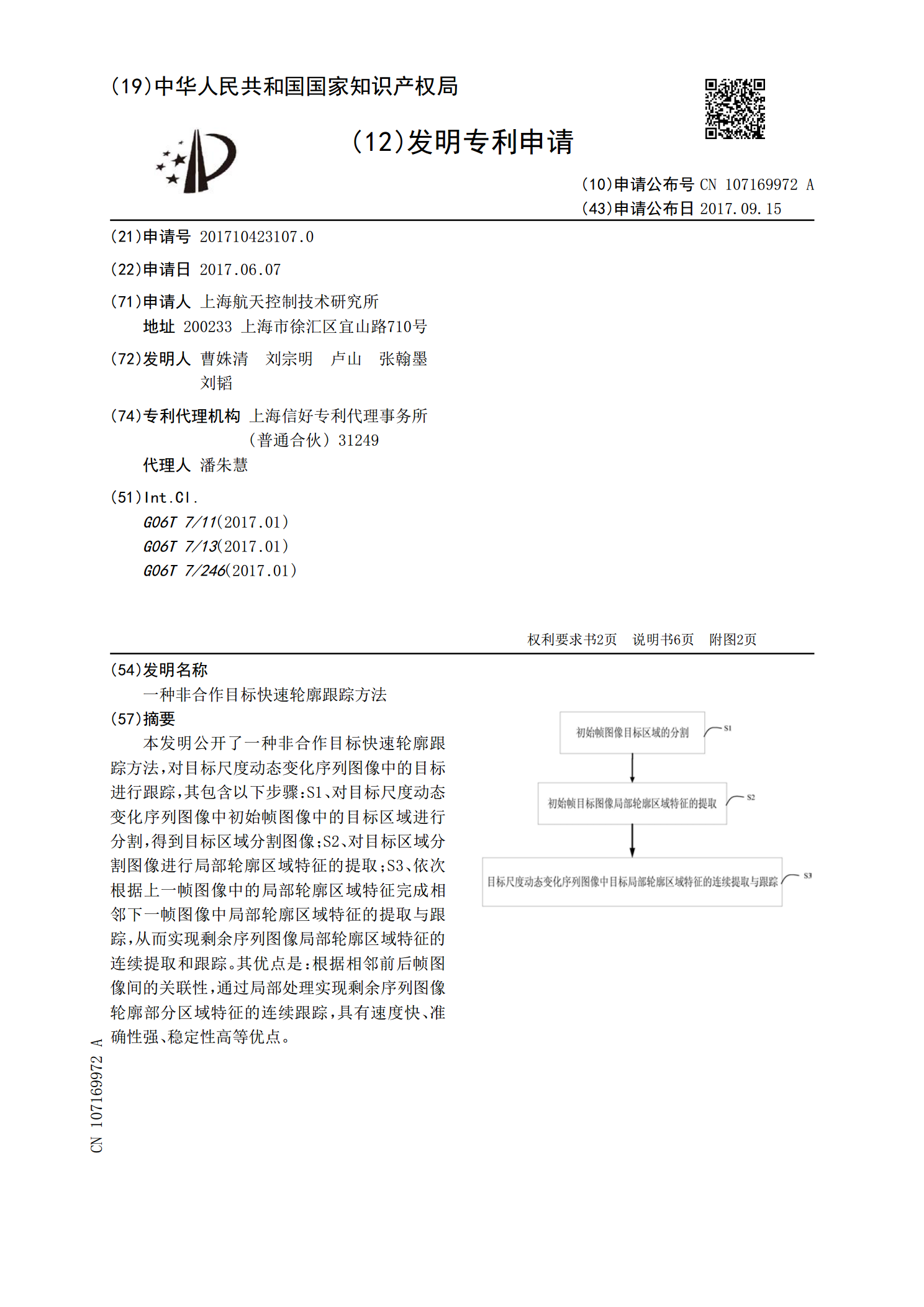
本发明提供了基于轮廓判断非刚性目标是否存在遮挡的跟踪方法,属于计算机视觉领域,包括:通过目标检测算法获取运动目标;通过光流法对运动目标进行跟踪;对当前帧被跟踪运动目标进行遮挡判断,获取当前帧被跟踪运动目标的轮廓面积R
一种基于轮廓梯度的目标跟踪方法.pdf
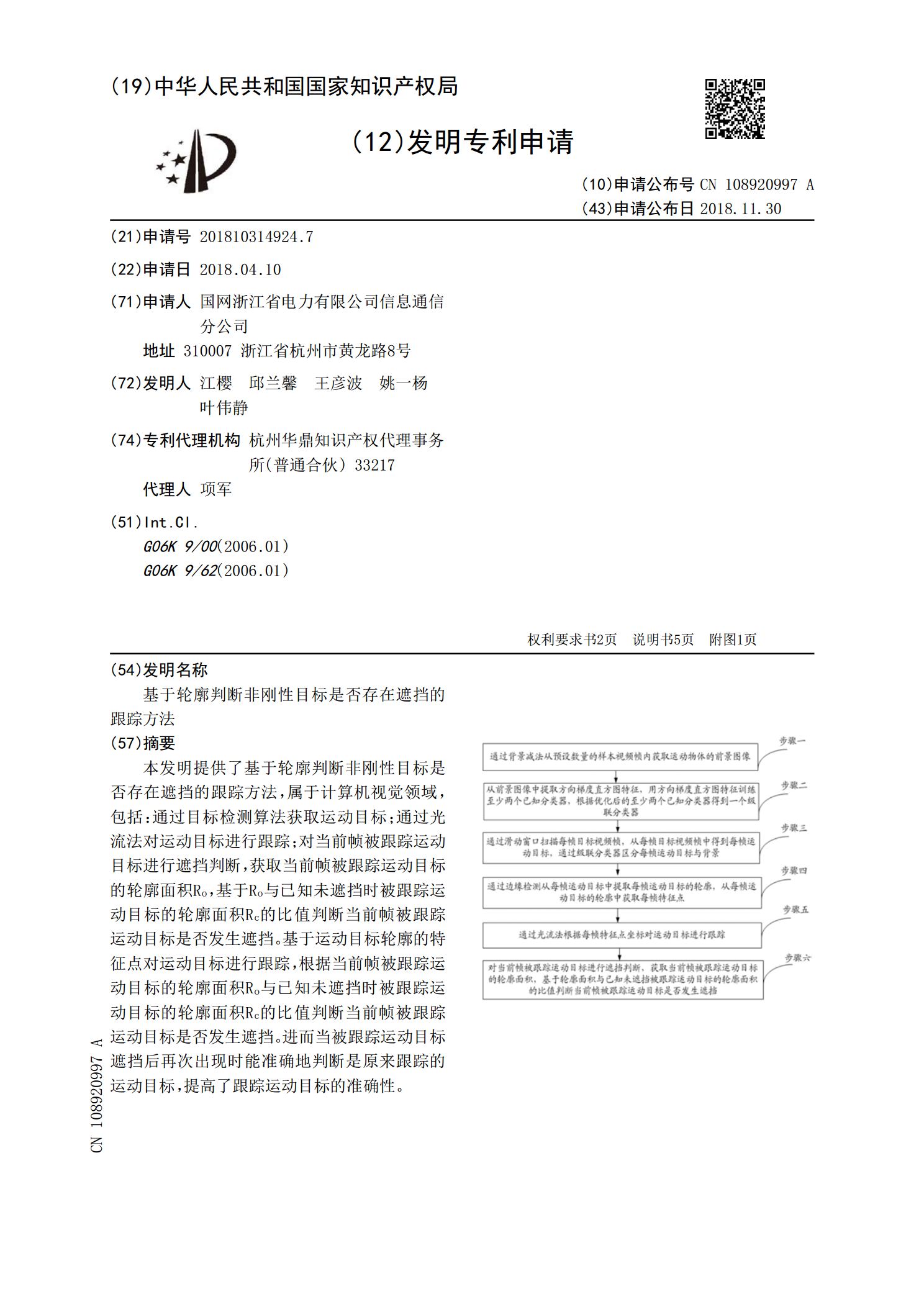
本发明具体公开一种基于轮廓梯度的目标跟踪方法,通过从输入的视频或图像序列的初始帧中分割候选目标,并提取出参考图像;提取参考图像轮廓作为标准特征模板,并进行尺度、角度变换,得到多尺度多角度模板序列;输入视频或图像序列的下一帧,提取该目标图像的梯度特征;将多尺度多角度模板序列在目标图像的特征图像上进行步长为1的滑动窗口扫描,并计算两者匹配的相似度;根据匹配位置、尺度因子、角度因子等信息,在目标图像中分割出目标所在的子区域作为下一次检测的参考图像进行更新;直至视频或图像序列所有帧检测完毕。本发明目的是:在于提供

一种基于形状语义的非参数轮廓跟踪评价方法.pdf
本发明涉及一种基于形状语义的非参数轮廓跟踪评价方法,主要包含步骤:首先采用最小空间距离法获得当前帧图像的非参数轮廓跟踪结果与标准轮廓位置间的对应关系;然后对非参数轮廓跟踪结果与标准轮廓进行二值化处理,提取每个轮廓点的形状上下文特征;最后在最小空间距离法获得的对象关系的局部区域中,采用金字塔匹配核进行搜索,从而获得基于轮廓语义的匹配关系和距离度量。本发明实现了有效的非参数轮廓跟踪结果的评价,是一种通用的方法,对于任意轮廓跟踪结果均适用,对于轮廓表示没有任何限制,无需采用控制点表示轮廓,也无需保证轮廓是闭合的