
基于Hermite插值的机器人轨迹规划方法.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Hermite插值的机器人轨迹规划方法.docx
基于Hermite插值的机器人轨迹规划方法摘要:本文研究了基于Hermite插值的机器人轨迹规划方法。首先介绍了机器人轨迹规划和Hermite插值的基本概念和理论知识,然后详细介绍了基于Hermite插值的机器人轨迹规划步骤和算法原理,最后通过仿真实验验证了方法的可行性和优越性。关键词:机器人轨迹规划;Hermite插值;机器人控制1.引言机器人轨迹规划是指在给定的起点和终点之间计算路径,使机器人按照指定的轨迹执行任务。在工业生产和服务机器人领域,精确、高效的轨迹规划是必需的。因此,研究机器人轨迹规划方法

基于样条插值算法的工业机器人轨迹规划研究.docx
基于样条插值算法的工业机器人轨迹规划研究基于样条插值算法的工业机器人轨迹规划研究摘要:工业机器人的轨迹规划是实现高效自动化生产的关键技术之一。样条插值算法作为一种常用的轨迹规划方法,通过对离散点进行插值,能够生成平滑连续的轨迹。本文基于样条插值算法,结合工业机器人的特点,研究了工业机器人轨迹规划的关键技术和应用,探索了提高工业机器人轨迹规划精度和效率的方法,并结合实例验证了该算法的可行性和有效性。关键词:样条插值算法;工业机器人;轨迹规划;精度;效率1.引言工业机器人的广泛应用使轨迹规划成为了工业自动化生

Hermite插值.ppt
§2.6Hermite插值误差估计:对hi(x):x=xj(ji)为其二重零点,故应含有因式(xxj)2(ji),因此可以设为对:由于x=xj(ji)为其二重零点,xi为一重零点,故可设:特别地,当n=1时,有:于是上式0这表明Hermite插值多项式是唯一的。Quiz:给定xi=i+1,i=0,1,2,3,4,5.下面哪个是h2(x)的图像?例解法2:∵x=0为二阶零点,故可设插值多项式为例

Hermite 插值.pdf
函数逼近的插值法——Hermite插值多项式主讲孟纯军Hermite插值多项式Lagrange插值公式所求得L(x)保证了节点处的函数值相等,也就是保证了函数的连续性。但不少实际问题还需要插值得光滑度,也就是还要求它在节点处的导数值也相等,导数的阶数越高则光滑度越高。现代的仿生学就是一个典型的例子。在设计交通具的外形,就是参照海豚的标本上已知点及已知点的导数,做插值在计算机上模拟海豚的外形制成飞机、汽车等外形。Hermite插值问题的提法给定节点xx01,,...,xn,给定函数fx()n在节点处{
工业机器人轨迹规划中的耦合插值函数选择方法.pdf
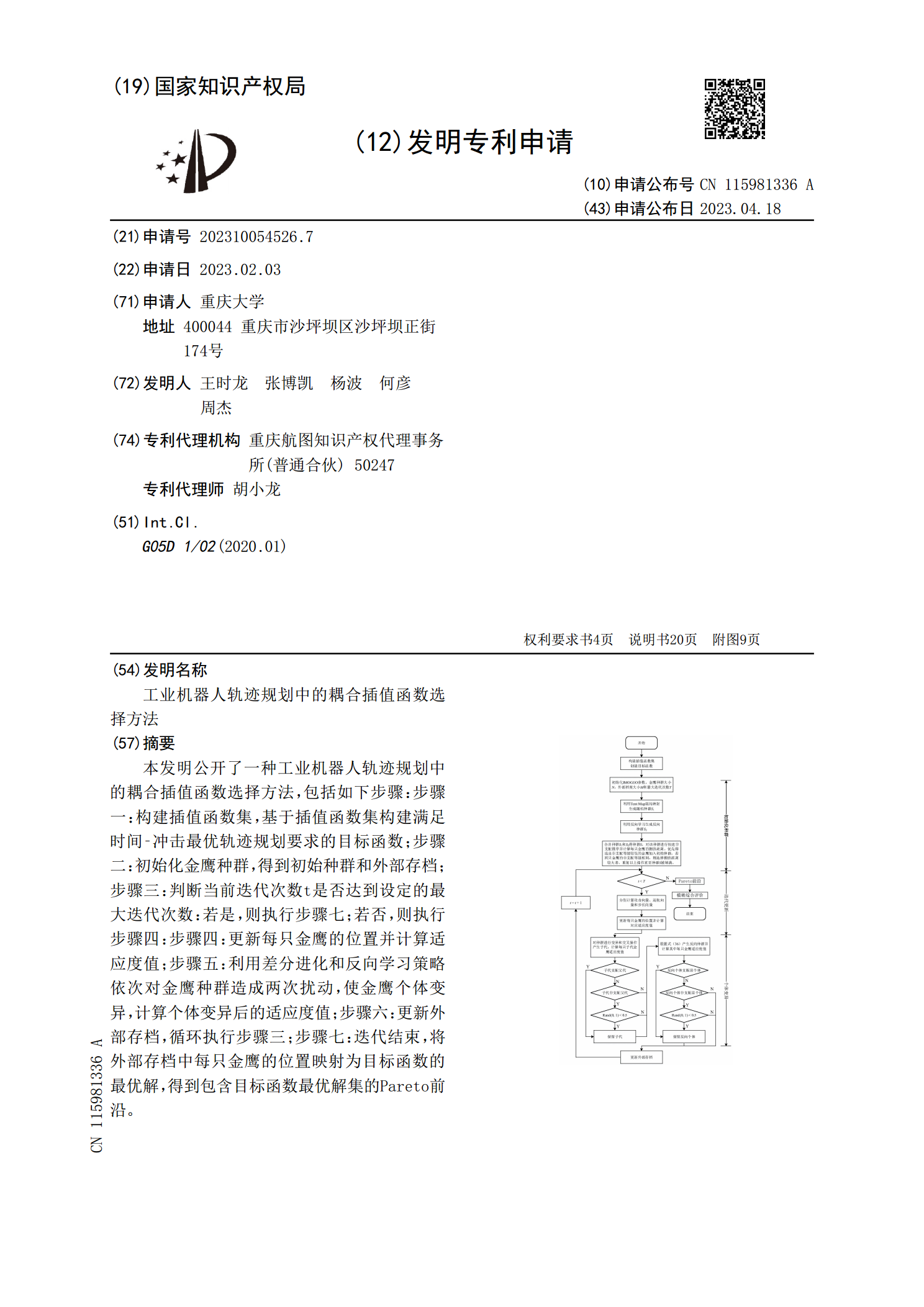
本发明公开了一种工业机器人轨迹规划中的耦合插值函数选择方法,包括如下步骤:步骤一:构建插值函数集,基于插值函数集构建满足时间‑冲击最优轨迹规划要求的目标函数;步骤二:初始化金鹰种群,得到初始种群和外部存档;步骤三:判断当前迭代次数t是否达到设定的最大迭代次数:若是,则执行步骤七;若否,则执行步骤四:步骤四:更新每只金鹰的位置并计算适应度值;步骤五:利用差分进化和反向学习策略依次对金鹰种群造成两次扰动,使金鹰个体变异,计算个体变异后的适应度值;步骤六:更新外部存档,循环执行步骤三;步骤七:迭代结束,将外部存