
工业机器人轨迹规划中的耦合插值函数选择方法.pdf

一吃****瀚文


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工业机器人轨迹规划中的耦合插值函数选择方法.pdf
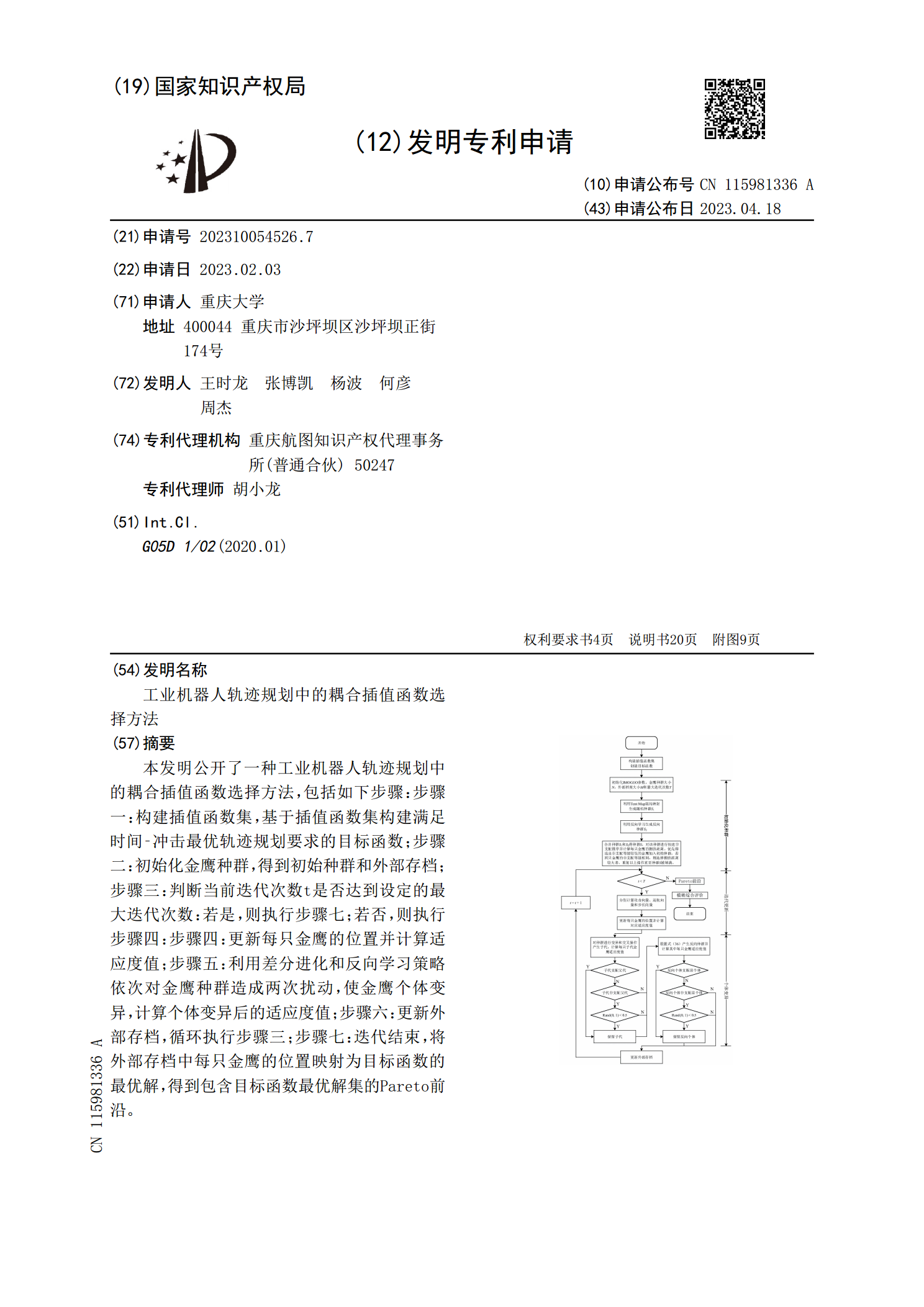
本发明公开了一种工业机器人轨迹规划中的耦合插值函数选择方法,包括如下步骤:步骤一:构建插值函数集,基于插值函数集构建满足时间‑冲击最优轨迹规划要求的目标函数;步骤二:初始化金鹰种群,得到初始种群和外部存档;步骤三:判断当前迭代次数t是否达到设定的最大迭代次数:若是,则执行步骤七;若否,则执行步骤四:步骤四:更新每只金鹰的位置并计算适应度值;步骤五:利用差分进化和反向学习策略依次对金鹰种群造成两次扰动,使金鹰个体变异,计算个体变异后的适应度值;步骤六:更新外部存档,循环执行步骤三;步骤七:迭代结束,将外部存

基于Hermite插值的机器人轨迹规划方法.docx
基于Hermite插值的机器人轨迹规划方法摘要:本文研究了基于Hermite插值的机器人轨迹规划方法。首先介绍了机器人轨迹规划和Hermite插值的基本概念和理论知识,然后详细介绍了基于Hermite插值的机器人轨迹规划步骤和算法原理,最后通过仿真实验验证了方法的可行性和优越性。关键词:机器人轨迹规划;Hermite插值;机器人控制1.引言机器人轨迹规划是指在给定的起点和终点之间计算路径,使机器人按照指定的轨迹执行任务。在工业生产和服务机器人领域,精确、高效的轨迹规划是必需的。因此,研究机器人轨迹规划方法

基于样条插值算法的工业机器人轨迹规划研究.docx
基于样条插值算法的工业机器人轨迹规划研究基于样条插值算法的工业机器人轨迹规划研究摘要:工业机器人的轨迹规划是实现高效自动化生产的关键技术之一。样条插值算法作为一种常用的轨迹规划方法,通过对离散点进行插值,能够生成平滑连续的轨迹。本文基于样条插值算法,结合工业机器人的特点,研究了工业机器人轨迹规划的关键技术和应用,探索了提高工业机器人轨迹规划精度和效率的方法,并结合实例验证了该算法的可行性和有效性。关键词:样条插值算法;工业机器人;轨迹规划;精度;效率1.引言工业机器人的广泛应用使轨迹规划成为了工业自动化生

基于三次Bézier三角样条插值的工业机器人连续路径轨迹规划.docx
基于三次Bézier三角样条插值的工业机器人连续路径轨迹规划基于三次Bézier三角样条插值的工业机器人连续路径轨迹规划摘要:工业机器人的连续路径规划是一个关键的问题,影响着机器人的运动效率和准确性。本文提出了一种基于三次Bézier三角样条插值的方法,用于机器人的连续路径轨迹规划。该方法使用三角样条插值来近似路径,并通过Bézier曲线来实现平滑的路径规划。仿真实验证明了该方法的有效性和稳定性。关键词:工业机器人,连续路径规划,三次Bézier三角样条插值第一节引言工业机器人在自动化生产中起着重要作用,

随机型值点间的插值轨迹规划研究.docx
随机型值点间的插值轨迹规划研究随机型值点间的插值轨迹规划研究摘要:随机型值点间的插值轨迹规划是一种在连续空间中生成平滑路径的方法。在本文中,我们将介绍随机型值点间的插值轨迹规划的背景和研究现状。我们将分析传统的插值方法以及随机型值点间的插值方法的优缺点,并提出一种基于随机型值点间的插值方法。通过实验和仿真结果,我们展示了这种方法在路径规划中的有效性和可行性。1.引言路径规划是机器人和自动驾驶领域中的一个重要问题。在实际应用中,我们需要在给定的起始点和目标点之间找到一条安全、高效的路径。传统的路径规划方法通