
园林巡监机器人行走装置的设计与研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

园林巡监机器人行走装置的设计与研究.docx
园林巡监机器人行走装置的设计与研究随着科技的不断发展,机器人技术得到了快速发展和广泛应用,无人车、无人机等智能设备已经成为人们生活中不可或缺的一部分。园林巡监机器人的出现为我们的生活带来了极大的便利和创新,成为城市园林管理的技术创新之一。其中,行走装置是园林巡监机器人的核心组成部分,对于机器人的行走和操作具有至关重要的作用。本文从几个方面对园林巡监机器人行走装置进行设计和研究。一、行走装置性能要求园林巡监机器人需要具备稳定性、机动性和耐久性。机器人在园区巡逻时,需要经过各种环境的考验,比如说需要爬坡、通过

一种巡线机器人行走装置.pdf
本发明公开了一种巡线机器人行走装置,涉及巡线机器人技术领域,包括移动架,移动架上固定有双轴电机,所述移动架上竖直固定有两个连接板,每个连接板上均设有对线缆上下夹持的从动转轮和主动转轮,连接板上设有用于调节从动轴纵向位置的升降组件,所述从动转轮和主动转轮之间连接有限位机构;本发明能通过设置的驱动机构带动主动转轮进行转动,主动转轮与线缆摩擦传动实现本装置沿着线缆进行移动,设置的从动转轮通过升降组件与主动转轮对线缆夹持,实现本装置的平稳移动,而设置的限位机构能对从动转轮和主动转轮进行与行走方向正交的方向进行限位
一种园林机器人行走装置.pdf
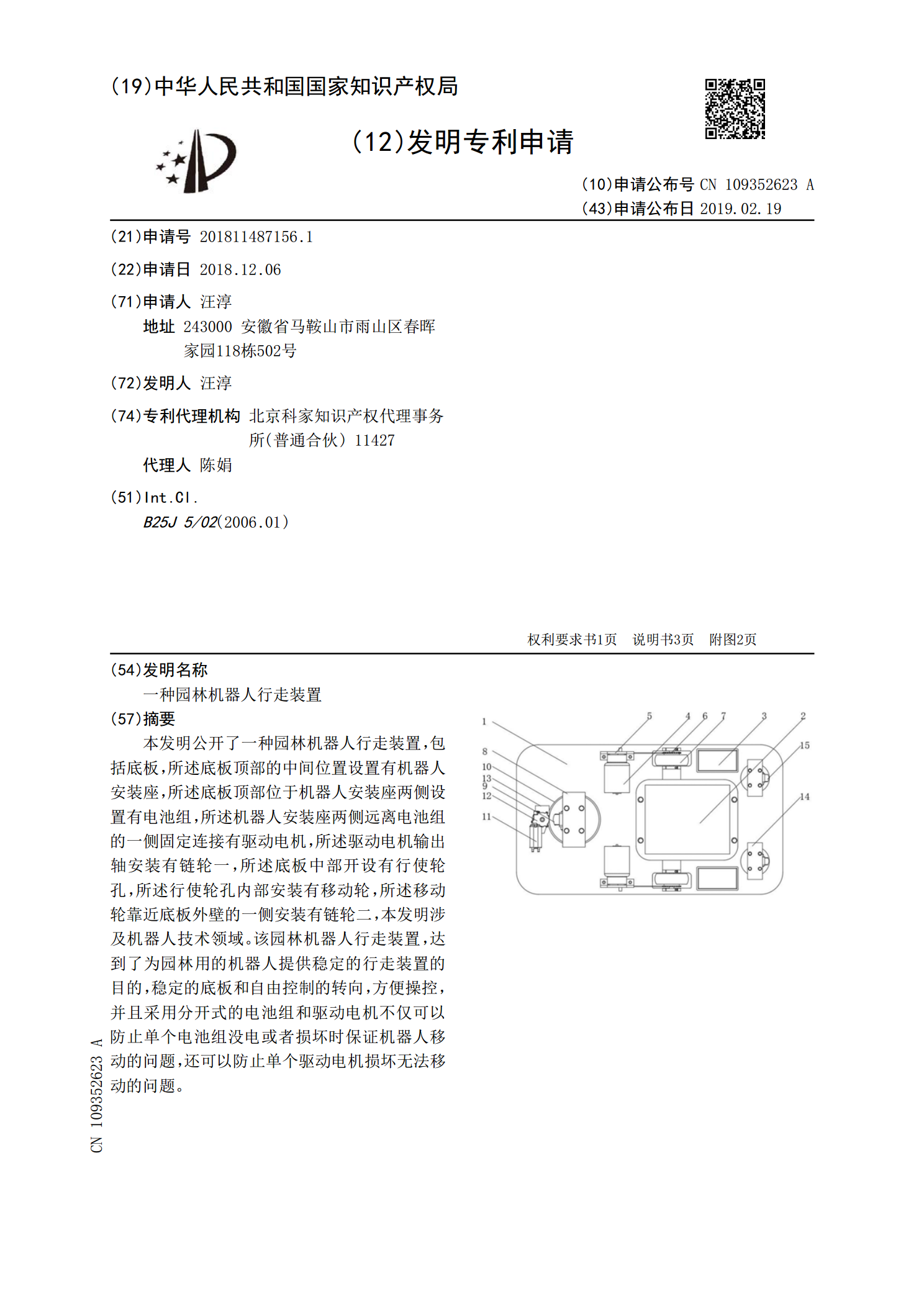
本发明公开了一种园林机器人行走装置,包括底板,所述底板顶部的中间位置设置有机器人安装座,所述底板顶部位于机器人安装座两侧设置有电池组,所述机器人安装座两侧远离电池组的一侧固定连接有驱动电机,所述驱动电机输出轴安装有链轮一,所述底板中部开设有行使轮孔,所述行使轮孔内部安装有移动轮,所述移动轮靠近底板外壁的一侧安装有链轮二,本发明涉及机器人技术领域。该园林机器人行走装置,达到了为园林用的机器人提供稳定的行走装置的目的,稳定的底板和自由控制的转向,方便操控,并且采用分开式的电池组和驱动电机不仅可以防止单个电池组
水平双分裂导线巡线机器人行走越障装置.pdf
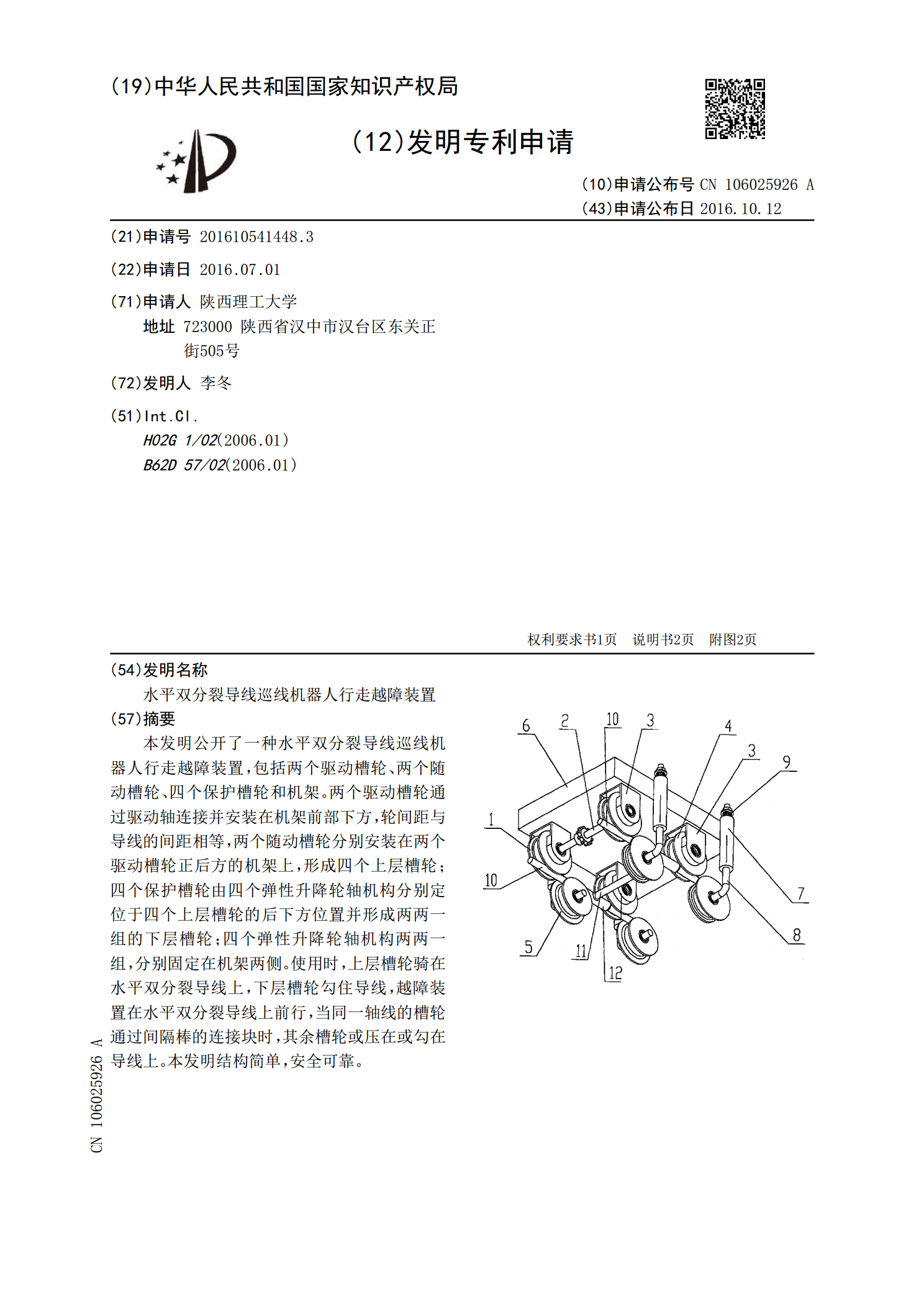
本发明公开了一种水平双分裂导线巡线机器人行走越障装置,包括两个驱动槽轮、两个随动槽轮、四个保护槽轮和机架。两个驱动槽轮通过驱动轴连接并安装在机架前部下方,轮间距与导线的间距相等,两个随动槽轮分别安装在两个驱动槽轮正后方的机架上,形成四个上层槽轮;四个保护槽轮由四个弹性升降轮轴机构分别定位于四个上层槽轮的后下方位置并形成两两一组的下层槽轮;四个弹性升降轮轴机构两两一组,分别固定在机架两侧。使用时,上层槽轮骑在水平双分裂导线上,下层槽轮勾住导线,越障装置在水平双分裂导线上前行,当同一轴线的槽轮通过间隔棒的连接

机房自动巡监机器人系统初探.docx
机房自动巡监机器人系统初探标题:机房自动巡监机器人系统初探摘要:机房是现代信息技术的重要基础设施,对于保护和管理机房设备的安全具有至关重要的作用。传统机房管理需要人工巡检和监控设备,但随着机房规模的不断扩大,传统的人工巡检方式存在效率低、漏检和误检等问题。因此,引入自动巡监机器人系统成为解决机房管理难题的有力工具。本文旨在探讨机房自动巡监机器人系统的技术原理、应用场景和发展前景,并分析其在机房管理中的优点和挑战。一、引言随着信息技术的飞速发展,机房作为数据存储和处理的核心设施,承担着重要的职责。机房内部设