
手持望远镜稳像系统的设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

手持望远镜稳像系统的设计.docx
手持望远镜稳像系统的设计手持望远镜稳像系统的设计摘要:手持望远镜的稳像是提高视觉体验和观测效果的重要因素。本文设计了一种手持望远镜稳像系统,通过陀螺仪、传感器和反馈控制系统实现了镜头的稳定,提高了使用者的观测精度和舒适度。关键词:手持望远镜,稳像,陀螺仪,传感器,反馈控制系统1.引言手持望远镜作为一种移动观测工具,广泛应用于户外景观观赏、户外运动、野外探险等领域。然而,由于人体抖动等因素,手持望远镜的镜头往往难以保持稳定,导致观测效果下降。因此,设计一种稳像系统对于提高观测精度和舒适度具有重要意义。2.系

手持望远镜稳像系统的设计的任务书.docx
手持望远镜稳像系统的设计的任务书任务书一、任务背景随着科学技术的不断发展,越来越多的人开始对天文学产生了浓厚的兴趣,而手持望远镜也成为了人们探索星空的主要工具之一。但是,由于手持望远镜的重量较大,并且要站立或坐下才能使用,容易造成观测时的晃动,从而影响使用效果,这也使得手持望远镜的使用范围受到了一定的限制。为了解决这一问题,设计一种手持望远镜稳像系统,使得用户能够更加稳定地观测天空,提高观测体验,进一步推进普及和发展天文学等领域,具有重大的现实意义和应用价值。二、任务目标本任务的主要目标是设计、制作一种手

基于FPGA的电子稳像系统设计.docx
基于FPGA的电子稳像系统设计基于FPGA的电子稳像系统设计摘要:随着数字摄影和移动摄像的迅猛发展,如何提高图像和视频的质量成为了摄影领域的关键问题之一。而在摄影或摄像过程中,由于手部抖动或镜头震动等原因,往往会导致图像或视频出现模糊或抖动现象,影响了观看体验。因此,研究和设计一种电子稳像系统是十分重要的。本论文针对这一问题,通过利用FPGA的高速计算和并行处理能力,设计并实现了一种基于FPGA的电子稳像系统,能够实时对图像或视频进行稳定处理,提高其质量和观看体验。关键词:FPGA,电子稳像,图像处理,视
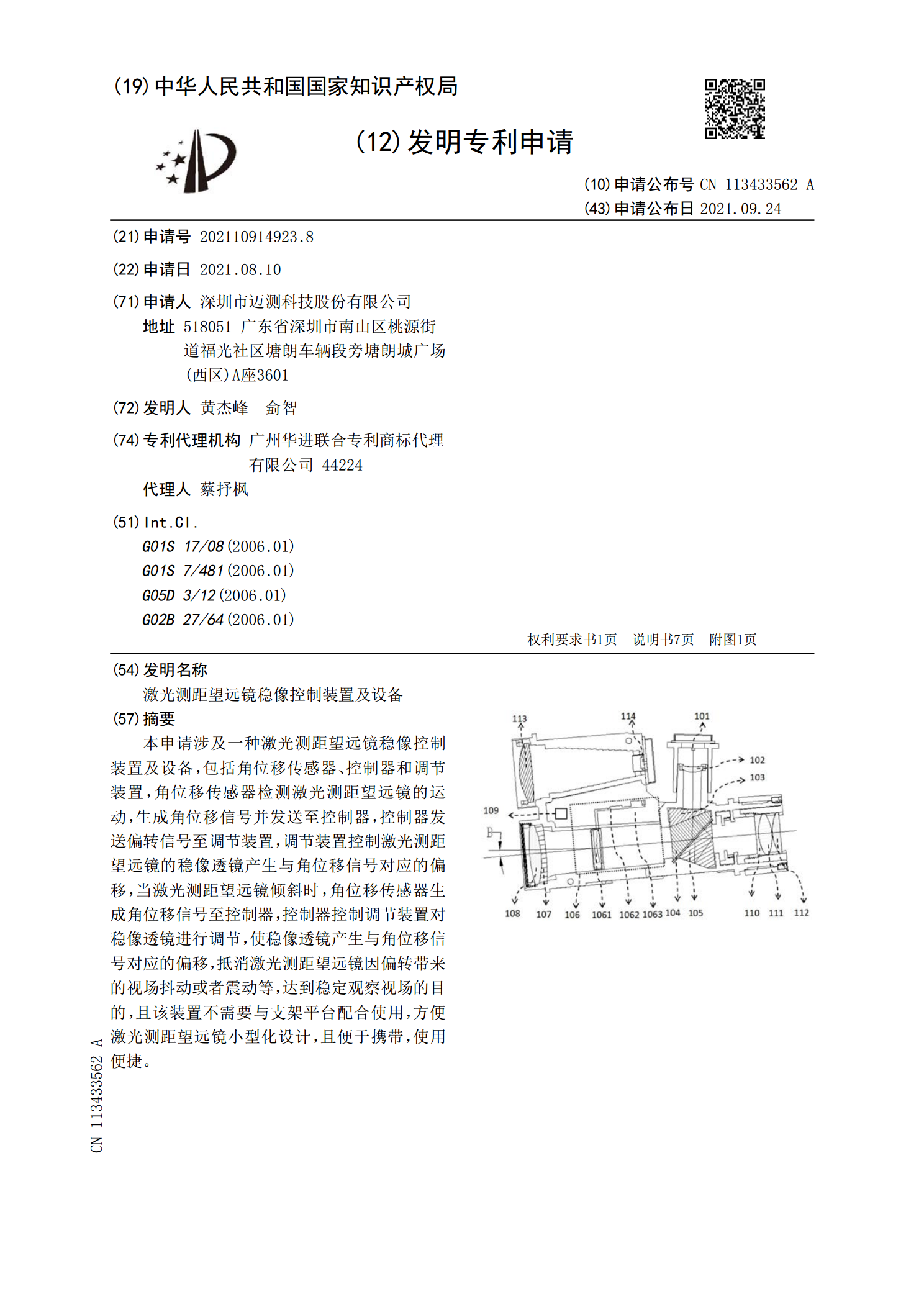
激光测距望远镜稳像控制装置及设备.pdf
本申请涉及一种激光测距望远镜稳像控制装置及设备,包括角位移传感器、控制器和调节装置,角位移传感器检测激光测距望远镜的运动,生成角位移信号并发送至控制器,控制器发送偏转信号至调节装置,调节装置控制激光测距望远镜的稳像透镜产生与角位移信号对应的偏移,当激光测距望远镜倾斜时,角位移传感器生成角位移信号至控制器,控制器控制调节装置对稳像透镜进行调节,使稳像透镜产生与角位移信号对应的偏移,抵消激光测距望远镜因偏转带来的视场抖动或者震动等,达到稳定观察视场的目的,且该装置不需要与支架平台配合使用,方便激光测距望远镜小

车载电子稳像系统设计的开题报告.docx
车载电子稳像系统设计的开题报告一、选题背景随着人们生活水平的提高和对驾驶安全的需求,越来越多的车载电子设备投入使用,其中车载电子稳像系统是其中一项重要的设备。车载电子稳像系统能够通过对车辆的振动进行实时的检测和分析,利用较为先进的数字信号处理算法,可以对车辆的振动进行及时的补偿,消除车辆行驶中由于路面不平和车辆自身振动产生的图像抖动,使车载摄像机产生稳定的图像。因此,在当前道路拥堵、交通事故频发的情况下,车载电子稳像系统对于提高安全驾驶、保障交通安全具有重要意义。二、选题意义1.提高行车安全车载电子稳像系