
单电机驱动的两自由度关节及其控制方法的研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单电机驱动的两自由度关节及其控制方法的研究的任务书.docx
单电机驱动的两自由度关节及其控制方法的研究的任务书任务书一、任务背景和意义在工业自动化、医疗机器人、智能家居等领域中,需要使用关节式机器人来完成不同的任务。关节式机器人由各种关节和连接构成,机器人的灵活性取决于关节的自由度。多数机器人系统需要大量的执行器来完成关节的自由运动,这带来成本和复杂性的问题。为了降低机器人系统成本和增强系统控制精度,一些研究人员提出了利用单电机进行驱动的两自由度关节设计方案。因此,本次任务的意义在于深入研究单电机驱动的两自由度关节及其控制方法。二、任务目的本次任务的主要目的是设计

面向肩腕关节的单电机驱动两自由度变刚度执行器研究的开题报告.docx
面向肩腕关节的单电机驱动两自由度变刚度执行器研究的开题报告一、研究背景和意义随着机器人在医疗、工业、家庭等领域的普及应用,对于机器人手臂的精度、可靠性和灵活性的要求也越来越高。在手臂的驱动器中,执行器是最常见的驱动器之一。然而,传统的执行器主要是通过刚性转动实现的,达到精度和力度的控制,但是其在柔性控制和难以对接生物界医疗领域的需求有所不足。因此,开展一种常规制造的执行器设计,可同时识别末端劫持机械器和生物力学性能,并在渐变手段时处于安全位置,具有较好的应用潜力。本文将研究一种单电机驱动两自由度变刚度执行
单控制器双电机两挡纯电动驱动系统及其控制方法.pdf
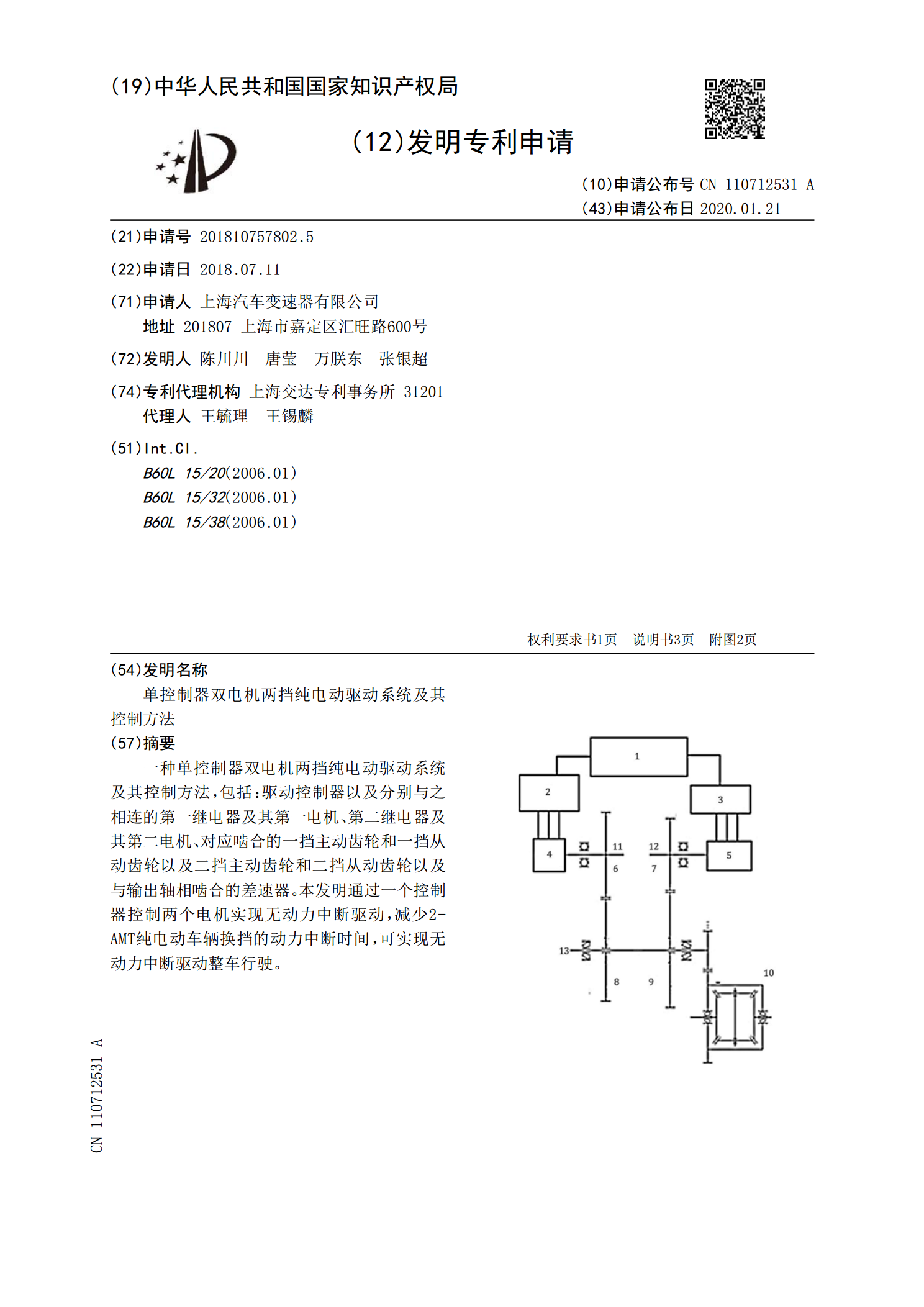
一种单控制器双电机两挡纯电动驱动系统及其控制方法,包括:驱动控制器以及分别与之相连的第一继电器及其第一电机、第二继电器及其第二电机、对应啮合的一挡主动齿轮和一挡从动齿轮以及二挡主动齿轮和二挡从动齿轮以及与输出轴相啮合的差速器。本发明通过一个控制器控制两个电机实现无动力中断驱动,减少2‑AMT纯电动车辆换挡的动力中断时间,可实现无动力中断驱动整车行驶。

双电机两档驱动控制系统及其驱动控制方法.pdf
本发明提供一种双电机两档驱动控制系统及其驱动控制方法,双电机两档驱动控制系统的电机控制器连接有电机一和电机二,整车控制器根据采集到的加速踏板信号、制动踏板信号和当前车速信号对驾驶员意图进行解析,计算出满足当前车辆行驶需求的目标转速和驱动转矩;电机控制器通过自动计算电机不同驱动扭矩分配的功率损失,选择总功率损失最小的扭矩分配为双电机间的最优驱动扭矩分配值。通过双电机和两档齿轮的合理匹配,在保证汽车动力性的前提下,有效提高了驱动系统的效率,最大程度地兼顾了经济性。

一种电机驱动两自由度机器人关节总成.pdf
本发明公开一种电机驱动两自由度机器人关节总成,包括第一电机总成、减速机构总成和第二电机总成;减速机构总成的内齿圈与第二电机总成的第二电机壳体刚性连接,减速机构总成通过交叉滚子轴承连接到第一电机总成的第一电机壳体上,且减速机构总成可相对第一电机壳体转动;减速机构总成包括两套行星减速轮系,两套行星减速轮系分别用于实现髋关节和膝关节电机输出扭矩的放大。本发明中的电机驱动两自由度机器人关节总成,两组行星减速轮系共用一件内齿轮圈,且均采用一级减速,显著简化了结构复杂度,使机器人关节具有较好的逆驱性,结构简单紧凑等优