
倾转三旋翼飞翼无人机系统设计与控制研究的任务书.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

倾转三旋翼飞翼无人机系统设计与控制研究的任务书.docx
倾转三旋翼飞翼无人机系统设计与控制研究的任务书一、任务背景无人机技术越来越成熟,应用范围也越来越广泛,而飞翼飞行器作为一种先进的无人机飞行器,在近年来也得到了广泛的研究和应用。然而,传统的固定翼飞行器在低速和悬停等方面存在一些困难,为了克服这些困难,需要设计一种新型的无人机系统。本项目旨在研究倾转三旋翼飞翼无人机系统的设计与控制,突破传统悬停和低速飞行的限制,提高无人机的飞行能力和效率。同时,对于无人机基础科学研究和工程应用都具有很大的应用前景和实际意义。二、研究目标1.设计倾转三旋翼飞翼无人机系统,包括

倾转三旋翼无人机倾转定高控制研究(英文).docx
倾转三旋翼无人机倾转定高控制研究(英文)ResearchonTiltrotorUAVTiltAngleControlforAltitudeMaintenanceAbstractInthispaper,wepresentastudyonthetiltanglecontroloftiltrotorunmannedaerialvehicles(UAVs).Themaingoalistodevelopacontrolalgorithmthatcanmaintainaconstantaltitudethrougho
串列翼倾转旋翼无人机.pdf
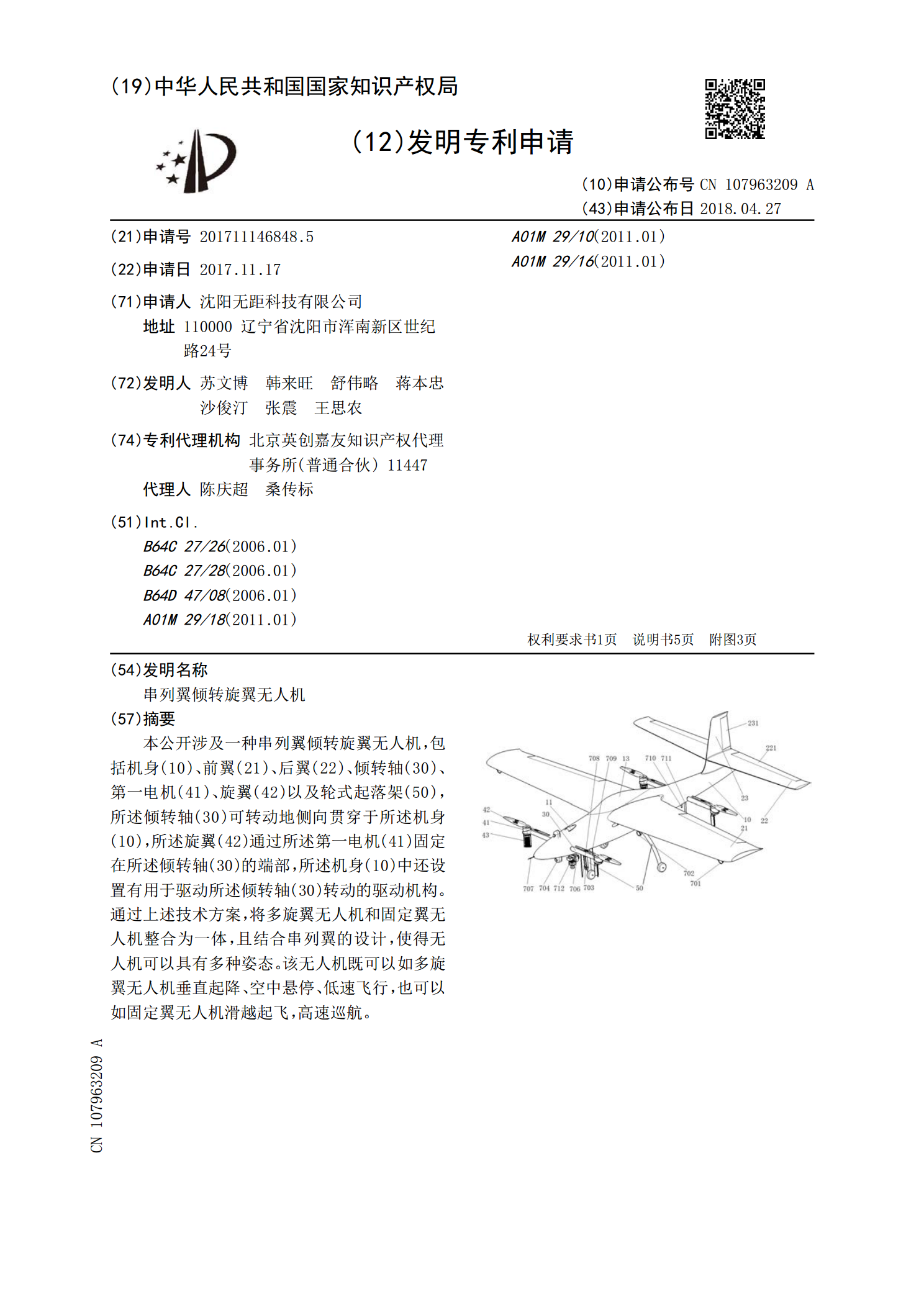
本公开涉及一种串列翼倾转旋翼无人机,包括机身(10)、前翼(21)、后翼(22)、倾转轴(30)、第一电机(41)、旋翼(42)以及轮式起落架(50),所述倾转轴(30)可转动地侧向贯穿于所述机身(10),所述旋翼(42)通过所述第一电机(41)固定在所述倾转轴(30)的端部,所述机身(10)中还设置有用于驱动所述倾转轴(30)转动的驱动机构。通过上述技术方案,将多旋翼无人机和固定翼无人机整合为一体,且结合串列翼的设计,使得无人机可以具有多种姿态。该无人机既可以如多旋翼无人机垂直起降、空中悬停、低速飞行,
一种变体飞翼式倾转旋翼无人机.pdf
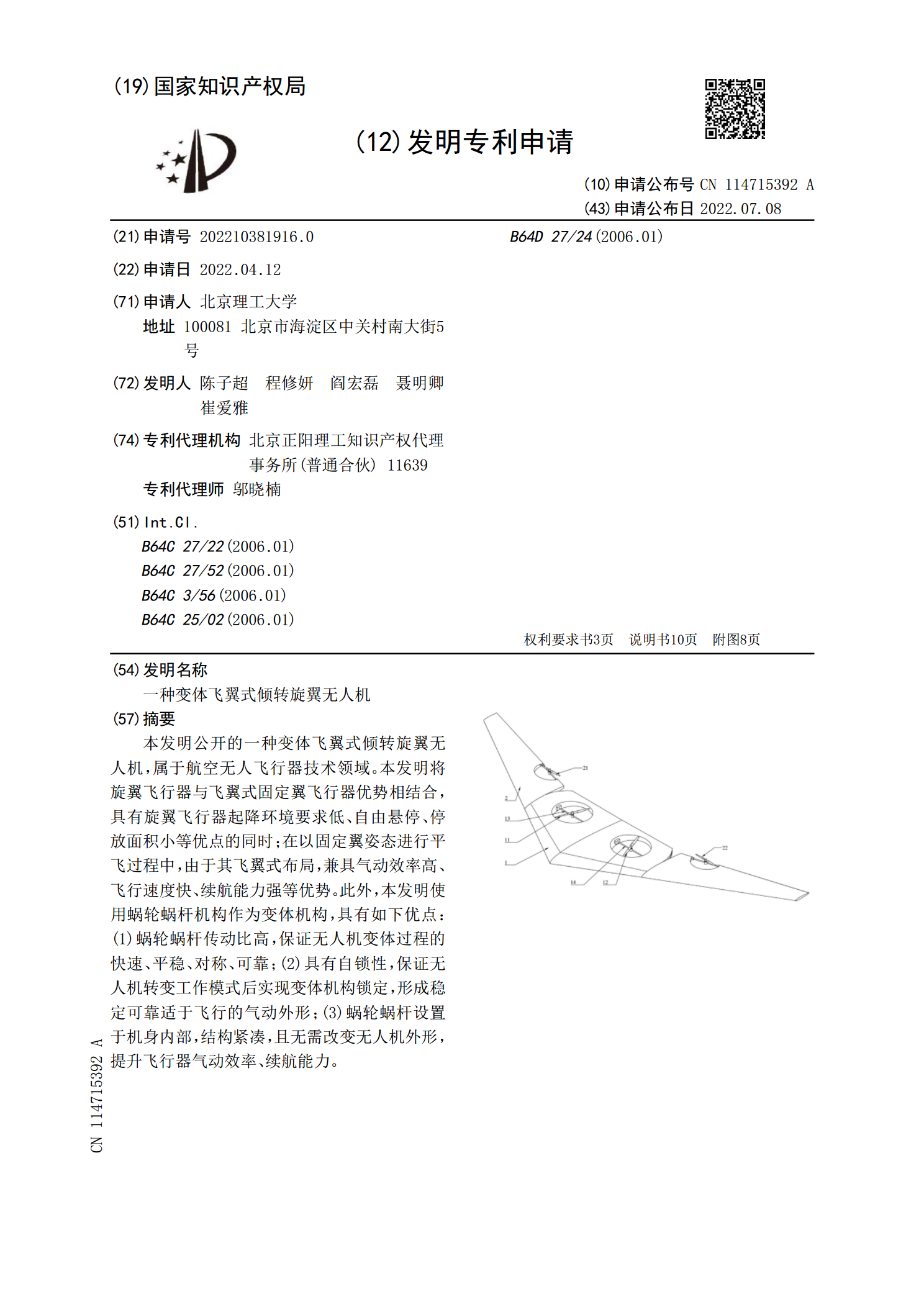
本发明公开的一种变体飞翼式倾转旋翼无人机,属于航空无人飞行器技术领域。本发明将旋翼飞行器与飞翼式固定翼飞行器优势相结合,具有旋翼飞行器起降环境要求低、自由悬停、停放面积小等优点的同时;在以固定翼姿态进行平飞过程中,由于其飞翼式布局,兼具气动效率高、飞行速度快、续航能力强等优势。此外,本发明使用蜗轮蜗杆机构作为变体机构,具有如下优点:(1)蜗轮蜗杆传动比高,保证无人机变体过程的快速、平稳、对称、可靠;(2)具有自锁性,保证无人机转变工作模式后实现变体机构锁定,形成稳定可靠适于飞行的气动外形;(3)蜗轮蜗杆设

四倾转旋翼无人机控制系统设计与实现.docx
四倾转旋翼无人机控制系统设计与实现四倾转旋翼无人机是一种具有良好操控性和适应性的无人机。其独特的结构使其可以实现垂直起降、飞行和悬停等多种飞行模式,并适应不同应用场景的需求。本文将重点讨论四倾转旋翼无人机的控制系统设计与实现。一、控制系统设计四倾转旋翼无人机的控制系统主要包括姿态控制、位置控制和导航控制三个部分。1.姿态控制姿态控制是四倾转旋翼无人机的基本控制模块,主要负责控制无人机在空中的姿态。一般采用PID控制器来实现姿态控制,其中包括滚转、俯仰和偏航三个方向的控制。PID控制器根据传感器测量到的无人