
全自动移栽机取喂苗机构研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全自动移栽机取喂苗机构研究的任务书.docx
全自动移栽机取喂苗机构研究的任务书任务书任务名称:全自动移栽机取喂苗机构研究任务背景:农业生产中,移栽机是一种常用的机械装备,可极大地提高移栽的效率和准确性,减轻劳动强度。而喂苗机构则是移栽机中非常关键的部件之一,能够实现将苗心自动送到钻头附近的目的,保证移植时的准确性。因此,研究全自动移栽机取喂苗机构,对提高农业生产效率和提升移栽机械化水平具有重要意义。任务目的:本次任务的主要目的是研究全自动移栽机取喂苗机构,探究新的喂苗方式和设计,提高喂苗的准确性和效率,从而提高移栽机的工作效率,减少人力资源的浪费,

全自动移栽机取喂苗机构研究的开题报告.docx
全自动移栽机取喂苗机构研究的开题报告一、选题背景随着现代农业的发展,自动化技术在农业生产中的应用越来越广泛。其中,全自动移栽机和喂苗机构是农业生产中重要的机械装备,可以大大提高生产效率,缩短生产周期,降低劳动成本。因此,本文选取了全自动移栽机取喂苗机构作为研究对象,旨在提高农业生产自动化水平,进一步推动农业现代化。二、研究目的本文的研究目的在于探讨全自动移栽机取喂苗机构的设计和优化,以实现高效、精准和自动化的种植和生产。具体来说,研究内容包括以下几个方面:1.分析全自动移栽机取喂苗机构的组成结构,理清各个

双臂式取苗机构优化设计及全自动移栽机试制任务书.docx
双臂式取苗机构优化设计及全自动移栽机试制任务书任务书一、任务的背景自动化技术在现代农业生产中的应用越来越广泛,其中机械化栽培是最重要的一环。随着农业生产规模的扩大和市场需求的增加,机械化作业的效率和质量要求也越来越高。针对现有的苗木移栽机,其传统的移栽方式往往需要人工将苗木从苗床中挖出,并移植到目的地,速度缓慢,效率低下,费力费时,影响了整个移栽作业的效率和质量。因此,本项目旨在设计开发一种新型的双臂式取苗机构,并进一步优化设计全自动移栽机,以提高农业生产效率和质量。二、任务的目标1.设计一种双臂式取苗机
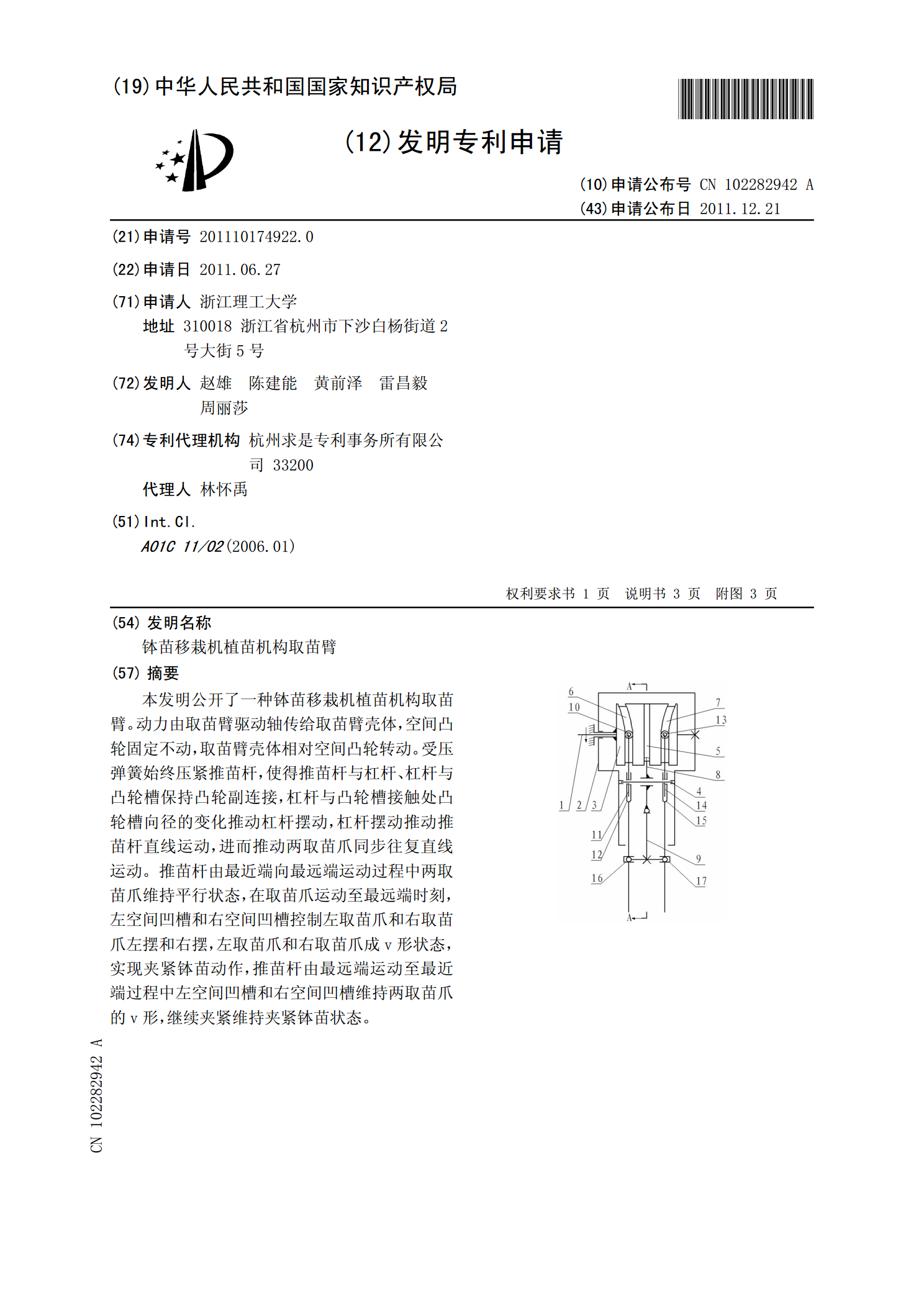
钵苗移栽机植苗机构取苗臂.pdf
本发明公开了一种钵苗移栽机植苗机构取苗臂。动力由取苗臂驱动轴传给取苗臂壳体,空间凸轮固定不动,取苗臂壳体相对空间凸轮转动。受压弹簧始终压紧推苗杆,使得推苗杆与杠杆、杠杆与凸轮槽保持凸轮副连接,杠杆与凸轮槽接触处凸轮槽向径的变化推动杠杆摆动,杠杆摆动推动推苗杆直线运动,进而推动两取苗爪同步往复直线运动。推苗杆由最近端向最远端运动过程中两取苗爪维持平行状态,在取苗爪运动至最远端时刻,左空间凹槽和右空间凹槽控制左取苗爪和右取苗爪左摆和右摆,左取苗爪和右取苗爪成v形状态,实现夹紧钵苗动作,推苗杆由最远端运动至最近
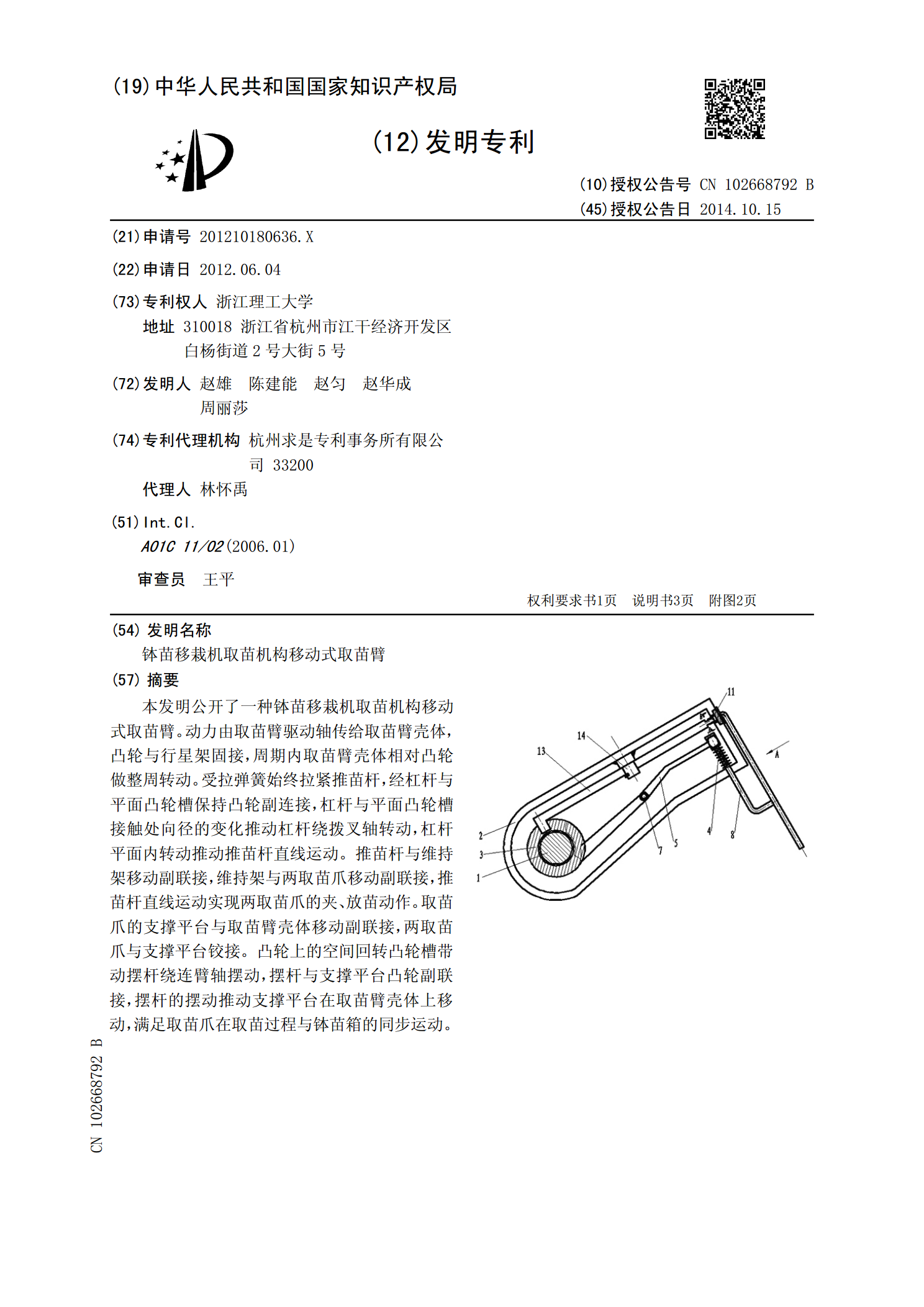
钵苗移栽机取苗机构移动式取苗臂.pdf
本发明公开了一种钵苗移栽机取苗机构移动式取苗臂。动力由取苗臂驱动轴传给取苗臂壳体,凸轮与行星架固接,周期内取苗臂壳体相对凸轮做整周转动。受拉弹簧始终拉紧推苗杆,经杠杆与平面凸轮槽保持凸轮副连接,杠杆与平面凸轮槽接触处向径的变化推动杠杆绕拨叉轴转动,杠杆平面内转动推动推苗杆直线运动。推苗杆与维持架移动副联接,维持架与两取苗爪移动副联接,推苗杆直线运动实现两取苗爪的夹、放苗动作。取苗爪的支撑平台与取苗臂壳体移动副联接,两取苗爪与支撑平台铰接。凸轮上的空间回转凸轮槽带动摆杆绕连臂轴摆动,摆杆与支撑平台凸轮副联接