
动态场景的光线跟踪加速结构研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

动态场景的光线跟踪加速结构研究.docx
动态场景的光线跟踪加速结构研究摘要光线跟踪算法在计算机图形学中是一种常用的渲染技术,适用于处理复杂的动态场景。本文研究了光线跟踪算法中加速结构的设计和优化,主要介绍了包围盒层次(BVH)和八叉树(Octree)两种加速结构的原理及其在动态场景中的应用。通过对比实验和性能测试,得出了两种加速结构在不同场景下的优缺点,并提出了一种基于自适应层次划分的结构优化方案。关键词:光线跟踪,动态场景,加速结构,包围盒层次,八叉树引言在计算机图形学中,光线跟踪是一种基于物理模拟的渲染技术,能够实现更加真实的场景呈现效果。
一种基于动态场景的实时光线追踪加速结构的方法.pdf
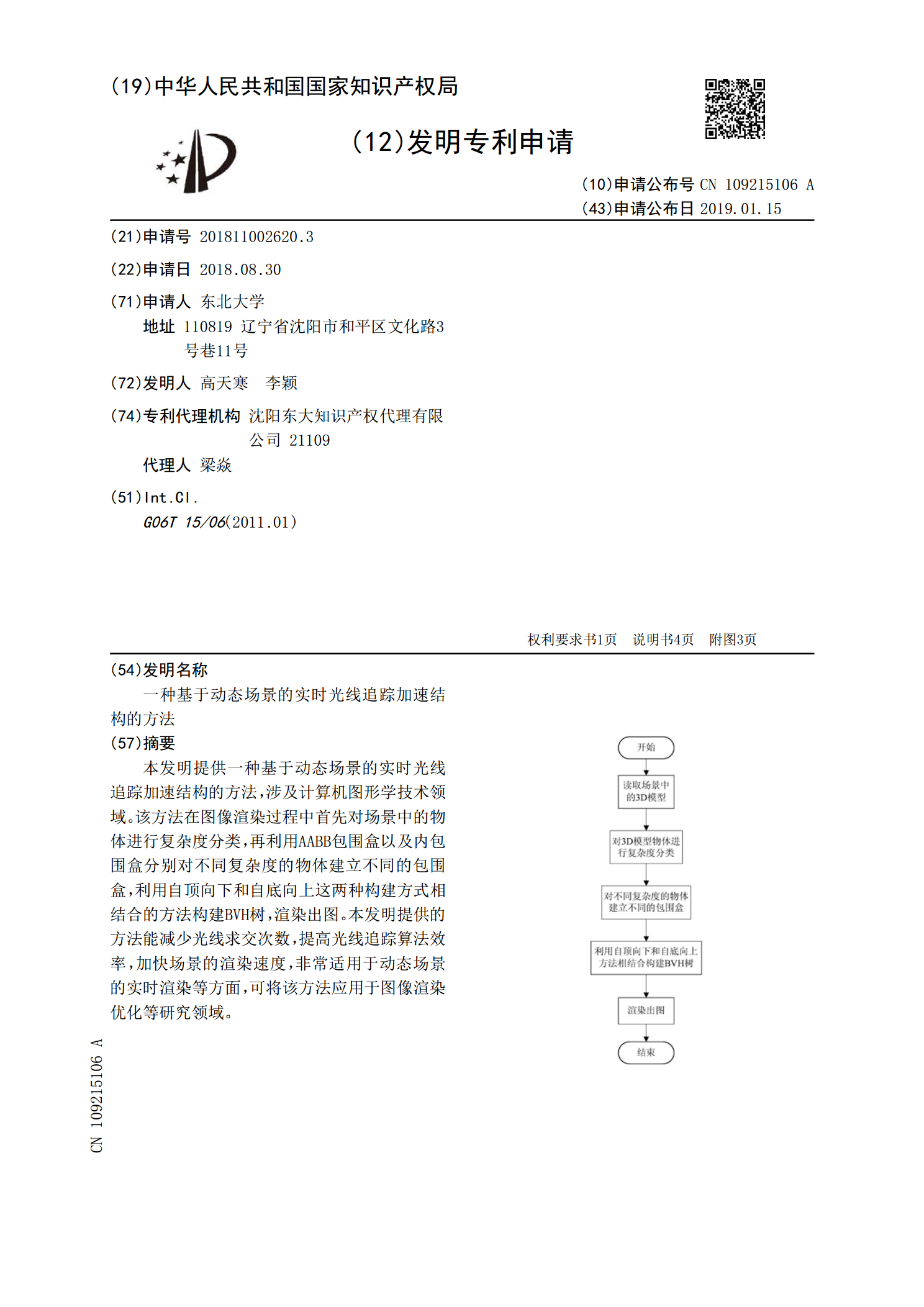
本发明提供一种基于动态场景的实时光线追踪加速结构的方法,涉及计算机图形学技术领域。该方法在图像渲染过程中首先对场景中的物体进行复杂度分类,再利用AABB包围盒以及内包围盒分别对不同复杂度的物体建立不同的包围盒,利用自顶向下和自底向上这两种构建方式相结合的方法构建BVH树,渲染出图。本发明提供的方法能减少光线求交次数,提高光线追踪算法效率,加快场景的渲染速度,非常适用于动态场景的实时渲染等方面,可将该方法应用于图像渲染优化等研究领域。

基于GPU的光线跟踪算法的加速结构比较研究的中期报告.docx
基于GPU的光线跟踪算法的加速结构比较研究的中期报告一、研究背景在电影、游戏等领域中,光线跟踪算法被广泛使用,该算法实现了真实感渲染。然而光线跟踪算法的计算量巨大,对计算速度的依赖很大,限制了实际应用领域的扩展。为了解决这个问题,使用GPU进行光线跟踪算法加速被广泛研究。它可以将光线跟踪算法的性能提高数倍甚至数十倍。二、主要内容本次研究比较了当前主流的基于GPU的光线跟踪算法加速结构。主要比较内容如下:1.光线跟踪加速算法以及实现主要包括Kd树、BVH树以及Octree等算法。Kd树是基于坐标轴的实现,B

基于OpenCL的实时KD-Tree与动态场景光线跟踪.docx
基于OpenCL的实时KD-Tree与动态场景光线跟踪随着计算机科学的不断发展,基于图形学的应用越来越受到关注,场景光线跟踪一直是图形学中的重要研究内容。场景光线跟踪的主要目标是快速而精确地计算出虚拟场景中的光照情况,并生成高质量的渲染图像。为了实现这一目标,光线跟踪需要利用光线与场景对象的相交关系,经常需要使用一些数据结构来加快计算速度,其中KD-Tree是一种常用的加速结构之一。KD-Tree是一种用于加速场景光线跟踪的数据结构,其提高了寻找与光线相交的场景对象的效率。它是由二叉树构成的,每个节点都表
一种基于光线路径复用的动态场景渲染加速方法.pdf
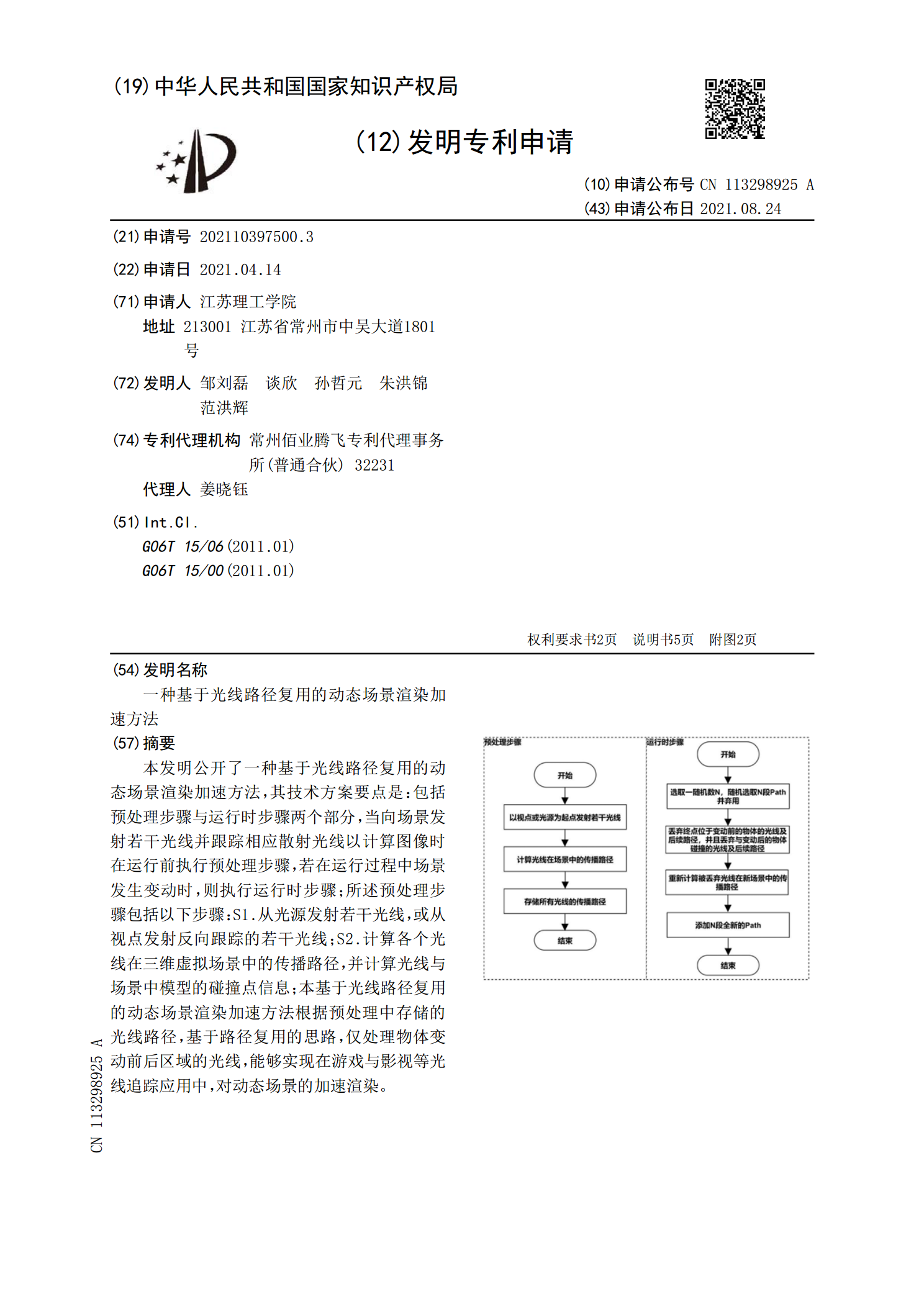
本发明公开了一种基于光线路径复用的动态场景渲染加速方法,其技术方案要点是:包括预处理步骤与运行时步骤两个部分,当向场景发射若干光线并跟踪相应散射光线以计算图像时在运行前执行预处理步骤,若在运行过程中场景发生变动时,则执行运行时步骤;所述预处理步骤包括以下步骤:S1.从光源发射若干光线,或从视点发射反向跟踪的若干光线;S2.计算各个光线在三维虚拟场景中的传播路径,并计算光线与场景中模型的碰撞点信息;本基于光线路径复用的动态场景渲染加速方法根据预处理中存储的光线路径,基于路径复用的思路,仅处理物体变动前后区域