
伸缩臂高空作业平台轻量化设计及控制系统研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

伸缩臂高空作业平台轻量化设计及控制系统研究.docx
伸缩臂高空作业平台轻量化设计及控制系统研究伸缩臂高空作业平台轻量化设计及控制系统研究摘要:伸缩臂高空作业平台作为一种重要的高空作业设备,在建筑施工、维护等领域有着广泛的应用。然而,传统的伸缩臂高空作业平台存在重量大、结构复杂、操控难度大等问题。本文通过对伸缩臂高空作业平台的轻量化设计以及控制系统的研究,旨在提高该设备的性能和效率。关键词:伸缩臂高空作业平台,轻量化设计,控制系统一、引言伸缩臂高空作业平台是一种常用的高空作业设备,它能够大大提高施工人员的工作效率和安全性。然而,传统的伸缩臂高空作业平台存在一

伸缩臂高空作业车臂架振动主动控制方法研究.doc
伸缩臂高空作业车臂架振动主动控制方法研究高空作业车作为一种运送人员到指定位置作业、营救被困伤员的设备,是现代城市消防中的必要装备。考虑到高空作业车载人为主的工作特点,对其作业过程中的振动进行主动控制以保证平稳性和安全性具有重要意义。本文以伸缩臂高空作业车为研究对象,通过对变幅液压系统的稳定性和臂架系统振动特性展开研究,基于自适应控制理论构建闭环系统,实现对臂架振动的主动控制。主要研究内容如下:首先,研究了伸缩臂高空作业车变幅系统中变幅液压缸的伸缩与变幅角的关系,针对伸缩臂高空作业车变幅液压系统,建立了变幅
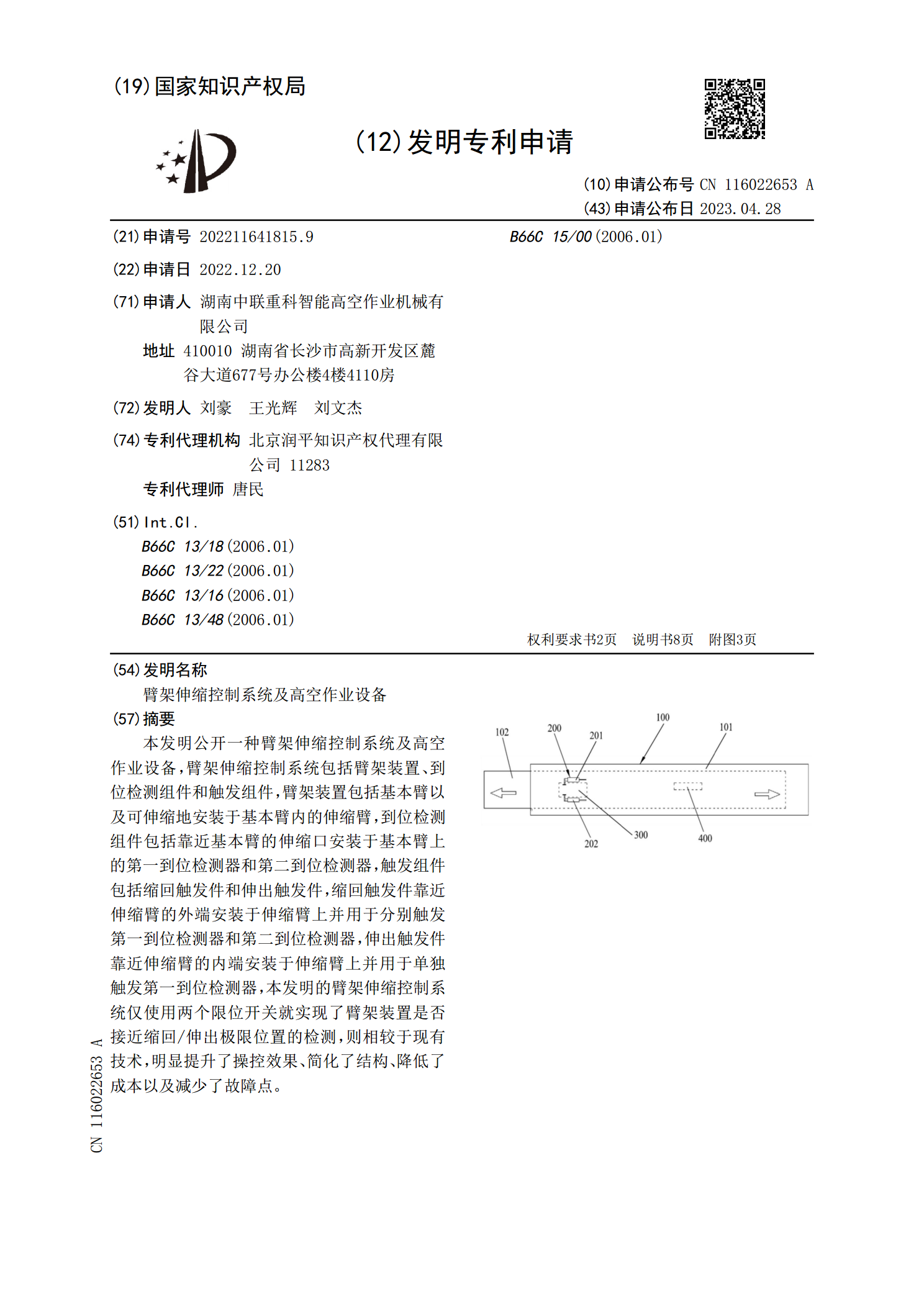
臂架伸缩控制系统及高空作业设备.pdf
本发明公开一种臂架伸缩控制系统及高空作业设备,臂架伸缩控制系统包括臂架装置、到位检测组件和触发组件,臂架装置包括基本臂以及可伸缩地安装于基本臂内的伸缩臂,到位检测组件包括靠近基本臂的伸缩口安装于基本臂上的第一到位检测器和第二到位检测器,触发组件包括缩回触发件和伸出触发件,缩回触发件靠近伸缩臂的外端安装于伸缩臂上并用于分别触发第一到位检测器和第二到位检测器,伸出触发件靠近伸缩臂的内端安装于伸缩臂上并用于单独触发第一到位检测器,本发明的臂架伸缩控制系统仅使用两个限位开关就实现了臂架装置是否接近缩回/伸出极限位

高空作业平台伸缩臂有限元分析及优化.docx
高空作业平台伸缩臂有限元分析及优化高空作业平台伸缩臂有限元分析及优化摘要:高空作业平台是一种用于在建筑工地、桥梁和高层设施维护等场所进行高空作业的设备。伸缩臂是高空作业平台的核心部件,它承担着支撑和提升作业平台的重要任务。本文通过有限元分析和优化方法,对高空作业平台伸缩臂进行了研究,目的是提高其结构的强度和稳定性,以确保高空作业的安全进行。关键词:高空作业平台、伸缩臂、有限元分析、优化、结构强度、稳定性引言:高空作业平台是用于进行高处作业的专用设备,广泛应用于建筑施工、桥梁维修和高层设施维护等领域。伸缩臂
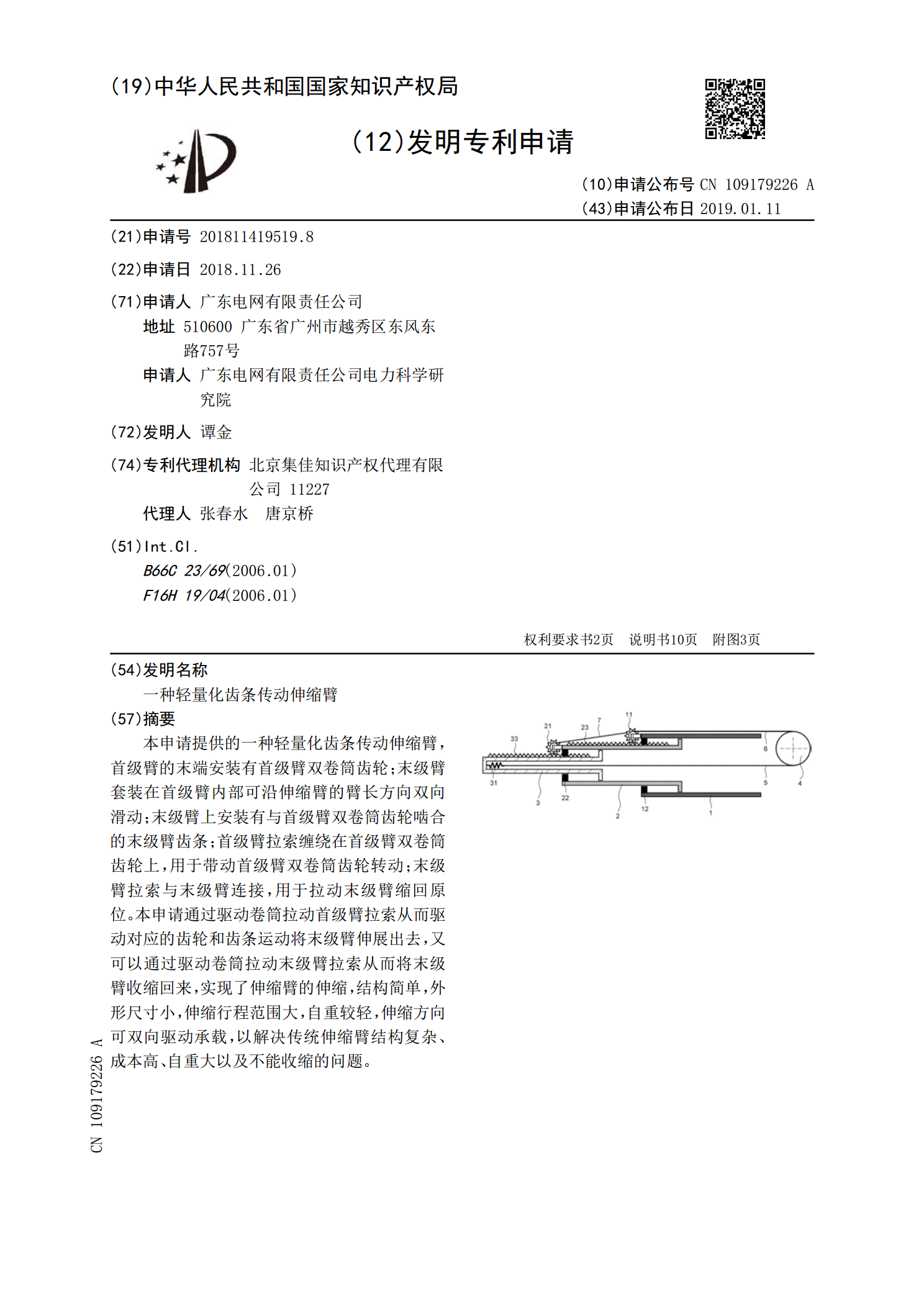
一种轻量化齿条传动伸缩臂.pdf
本申请提供的一种轻量化齿条传动伸缩臂,首级臂的末端安装有首级臂双卷筒齿轮;末级臂套装在首级臂内部可沿伸缩臂的臂长方向双向滑动;末级臂上安装有与首级臂双卷筒齿轮啮合的末级臂齿条;首级臂拉索缠绕在首级臂双卷筒齿轮上,用于带动首级臂双卷筒齿轮转动;末级臂拉索与末级臂连接,用于拉动末级臂缩回原位。本申请通过驱动卷筒拉动首级臂拉索从而驱动对应的齿轮和齿条运动将末级臂伸展出去,又可以通过驱动卷筒拉动末级臂拉索从而将末级臂收缩回来,实现了伸缩臂的伸缩,结构简单,外形尺寸小,伸缩行程范围大,自重较轻,伸缩方向可双向驱动承