
伸缩臂高空作业车臂架振动主动控制方法研究.doc

a是****澜吖


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

伸缩臂高空作业车臂架振动主动控制方法研究.doc
伸缩臂高空作业车臂架振动主动控制方法研究高空作业车作为一种运送人员到指定位置作业、营救被困伤员的设备,是现代城市消防中的必要装备。考虑到高空作业车载人为主的工作特点,对其作业过程中的振动进行主动控制以保证平稳性和安全性具有重要意义。本文以伸缩臂高空作业车为研究对象,通过对变幅液压系统的稳定性和臂架系统振动特性展开研究,基于自适应控制理论构建闭环系统,实现对臂架振动的主动控制。主要研究内容如下:首先,研究了伸缩臂高空作业车变幅系统中变幅液压缸的伸缩与变幅角的关系,针对伸缩臂高空作业车变幅液压系统,建立了变幅

伸缩臂高空作业车臂架变幅振动抑制研究的任务书.docx
伸缩臂高空作业车臂架变幅振动抑制研究的任务书任务书一、任务背景和目的伸缩臂高空作业车是一种常见的用于高空作业的特种设备。其具有灵活性高、作业范围广等优点,广泛应用于建筑、电力等行业。然而,在作业过程中,臂架的变幅振动问题成为制约作业效率和安全的重要因素。因此,为了提高作业效率和减少事故发生的风险,对伸缩臂高空作业车臂架变幅振动进行抑制研究具有重要意义。本次研究的目的在于通过分析伸缩臂高空作业车臂架变幅振动的原因,设计有效的抑制方法,减少振动对作业效果和安全的影响。具体任务如下:二、任务内容1.收集伸缩臂高

混凝土泵车臂架振动研究.docx
混凝土泵车臂架振动研究摘要:混凝土泵车是建筑施工中常用的一种机械设备,主要用于将混凝土从搅拌站泵送至施工现场。然而,在使用混凝土泵车的过程中,由于泵车臂架振动的原因,会对施工质量造成影响,同时也增加了设备的维护成本和使用寿命。本文从泵车臂架振动的成因、影响及解决方法三个方面进行了详细论述,为混凝土泵车的使用提供借鉴和参考。一、泵车臂架振动的成因1.混凝土输送带振动。当混凝土进入输送带时,由于混凝土浆体的特性,会产生一定的振动,影响了输送带和臂架的稳定性。2.泵送速度过快。在泵送混凝土时,如果泵送速度过快,
臂架伸缩控制系统及高空作业设备.pdf
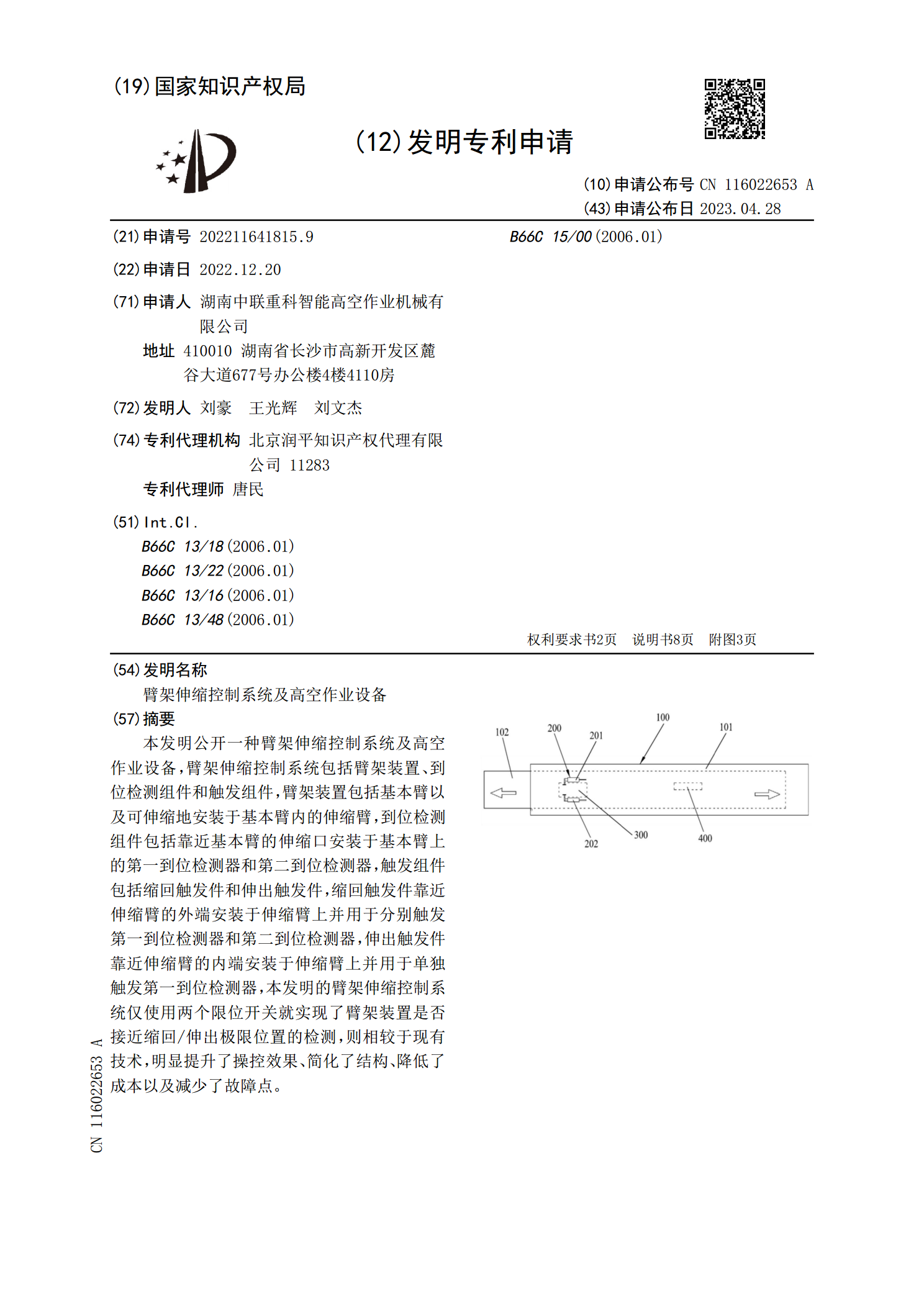
本发明公开一种臂架伸缩控制系统及高空作业设备,臂架伸缩控制系统包括臂架装置、到位检测组件和触发组件,臂架装置包括基本臂以及可伸缩地安装于基本臂内的伸缩臂,到位检测组件包括靠近基本臂的伸缩口安装于基本臂上的第一到位检测器和第二到位检测器,触发组件包括缩回触发件和伸出触发件,缩回触发件靠近伸缩臂的外端安装于伸缩臂上并用于分别触发第一到位检测器和第二到位检测器,伸出触发件靠近伸缩臂的内端安装于伸缩臂上并用于单独触发第一到位检测器,本发明的臂架伸缩控制系统仅使用两个限位开关就实现了臂架装置是否接近缩回/伸出极限位

高空作业车直臂系统振动抑制研究.docx
高空作业车直臂系统振动抑制研究随着经济的不断发展,高空作业车在建筑、电力、石化等行业中得到了广泛的应用。高空作业车的推出极大地提高了高空作业效率,但同时也带来了一定的安全隐患。其中,直臂系统的振动问题是高空作业车在使用过程中面临的主要问题之一。直臂系统的振动不仅会影响高空作业车的稳定性和安全性,还会影响作业质量和效率。因此,如何抑制直臂系统的振动问题,成为了目前工程领域研究的热点问题之一。一、高空作业车直臂系统振动原因高空作业车的直臂系统振动主要有以下几个因素:1.外部环境因素:如风力大小、地面坡度、地面