
一种仿毛虫蠕动管道爬行机器人及控制方法.pdf

一吃****继勇

1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仿毛虫蠕动管道爬行机器人及控制方法.pdf
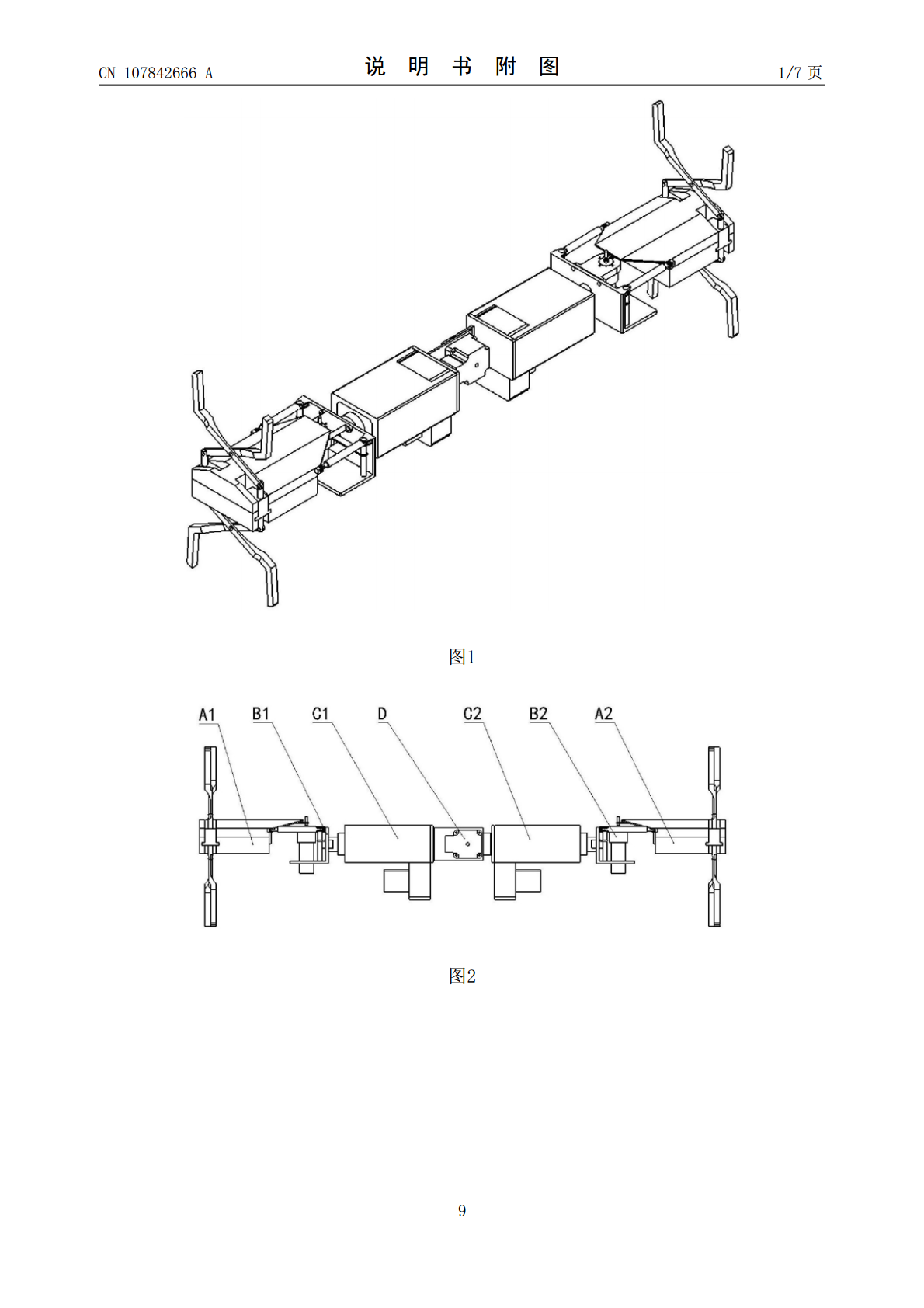
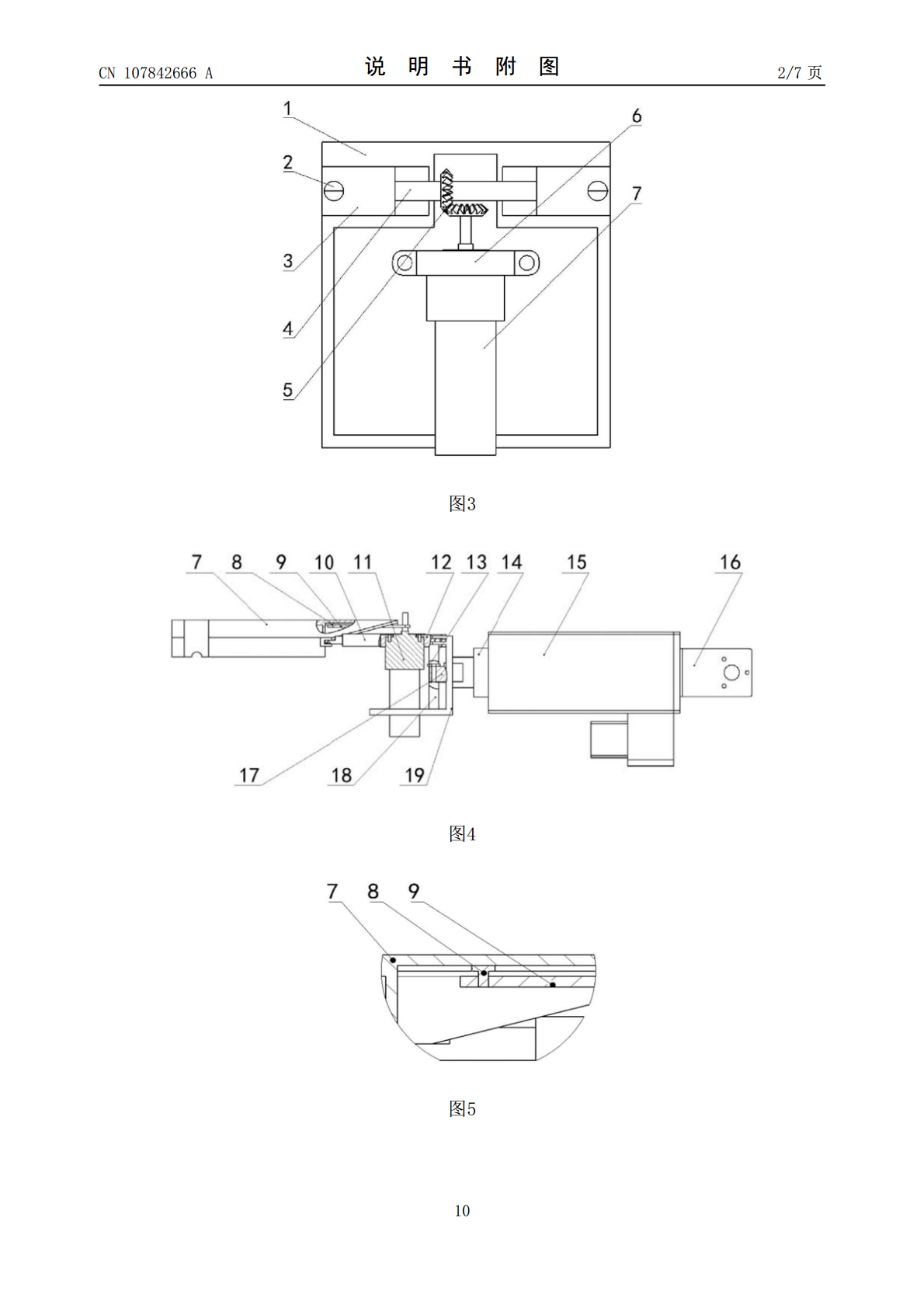
本发明涉及一种仿毛虫蠕动管道爬行机器人及控制方法。该机器人包括夹持模块、位移模块、蠕动关节和一个转动关节;其中,夹持模块通过锥齿轮传动机构把电机的转矩传递到丝杆上,从而使得丝母滑块沿丝杆方向移动,通过剪式机构通过杠杆原理夹紧力大和夹紧时往前收缩的特点,实现手爪在管外的夹紧和在管内的支撑;位移模块分别与蠕动关节刚性相连,位移模块通过两个气缸伸长距离不同和电机带动主动连板转动的组合运动,使夹持模块在平面内灵活转动;然后通过两手爪的交替夹持运动和伸缩关节电缸的往复直线运动,使机器人沿管道蠕动爬行。本发明环境适应
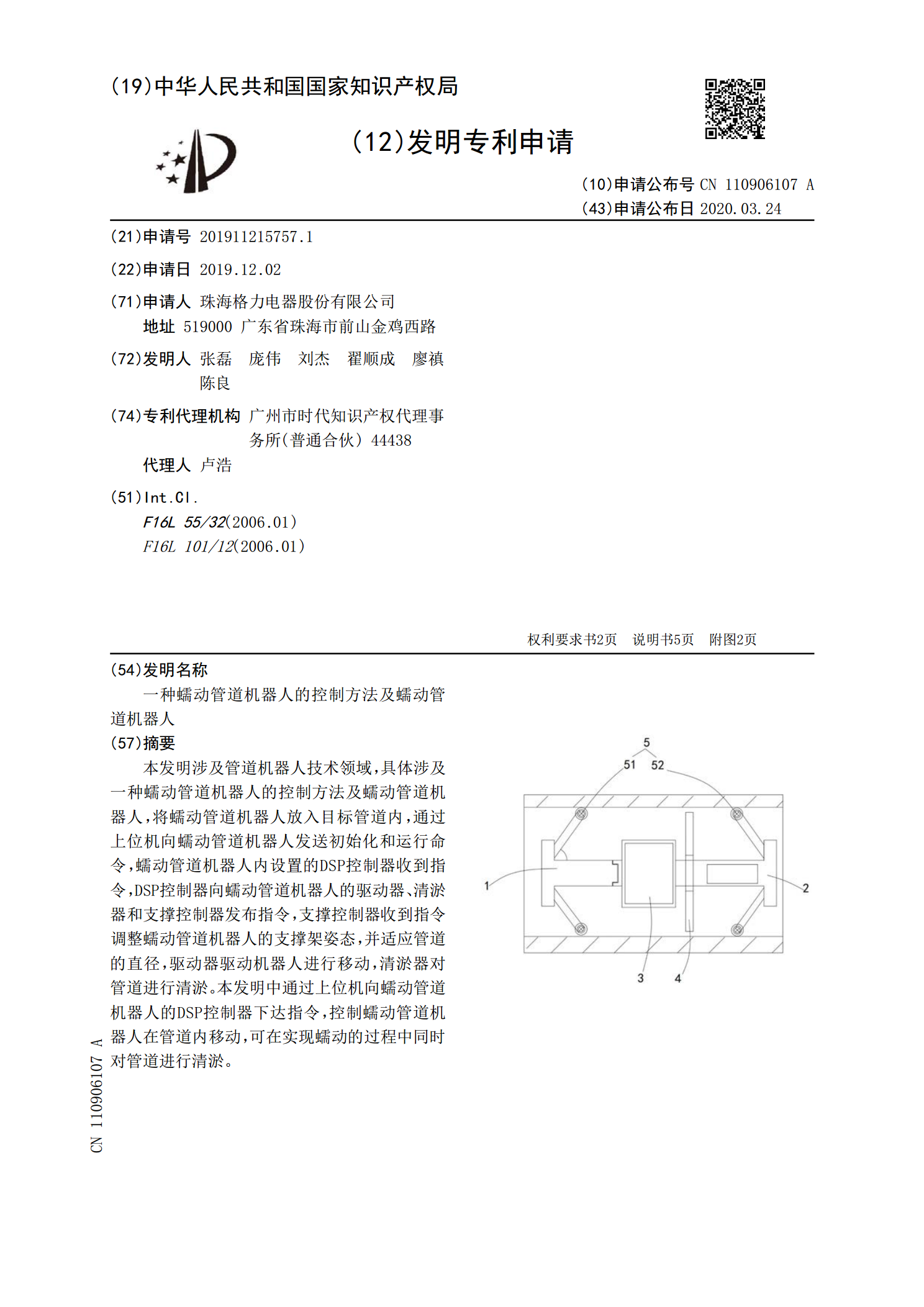
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道
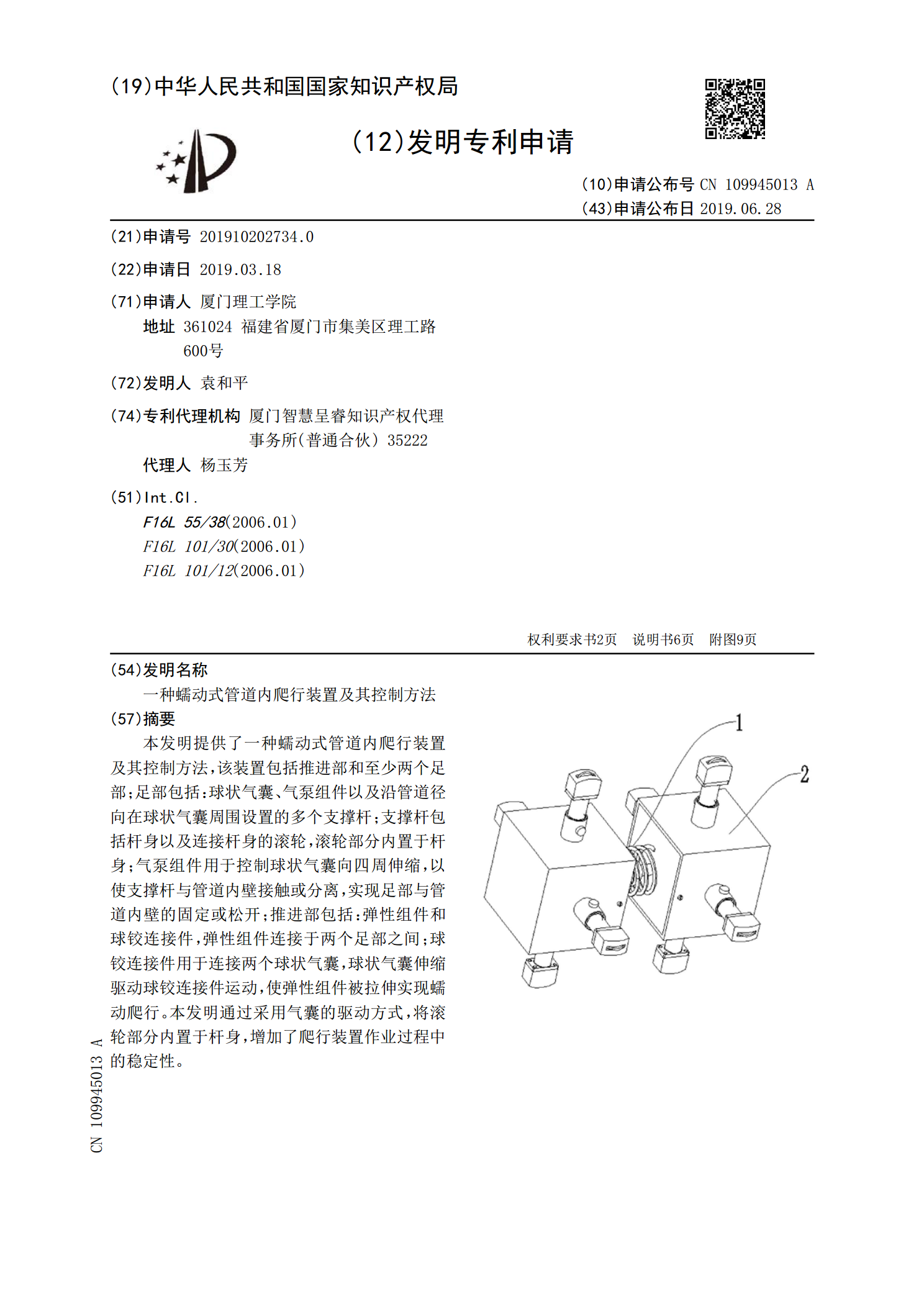
一种蠕动式管道内爬行装置及其控制方法.pdf
本发明提供了一种蠕动式管道内爬行装置及其控制方法,该装置包括推进部和至少两个足部;足部包括:球状气囊、气泵组件以及沿管道径向在球状气囊周围设置的多个支撑杆;支撑杆包括杆身以及连接杆身的滚轮,滚轮部分内置于杆身;气泵组件用于控制球状气囊向四周伸缩,以使支撑杆与管道内壁接触或分离,实现足部与管道内壁的固定或松开;推进部包括:弹性组件和球铰连接件,弹性组件连接于两个足部之间;球铰连接件用于连接两个球状气囊,球状气囊伸缩驱动球铰连接件运动,使弹性组件被拉伸实现蠕动爬行。本发明通过采用气囊的驱动方式,将滚轮部分内置
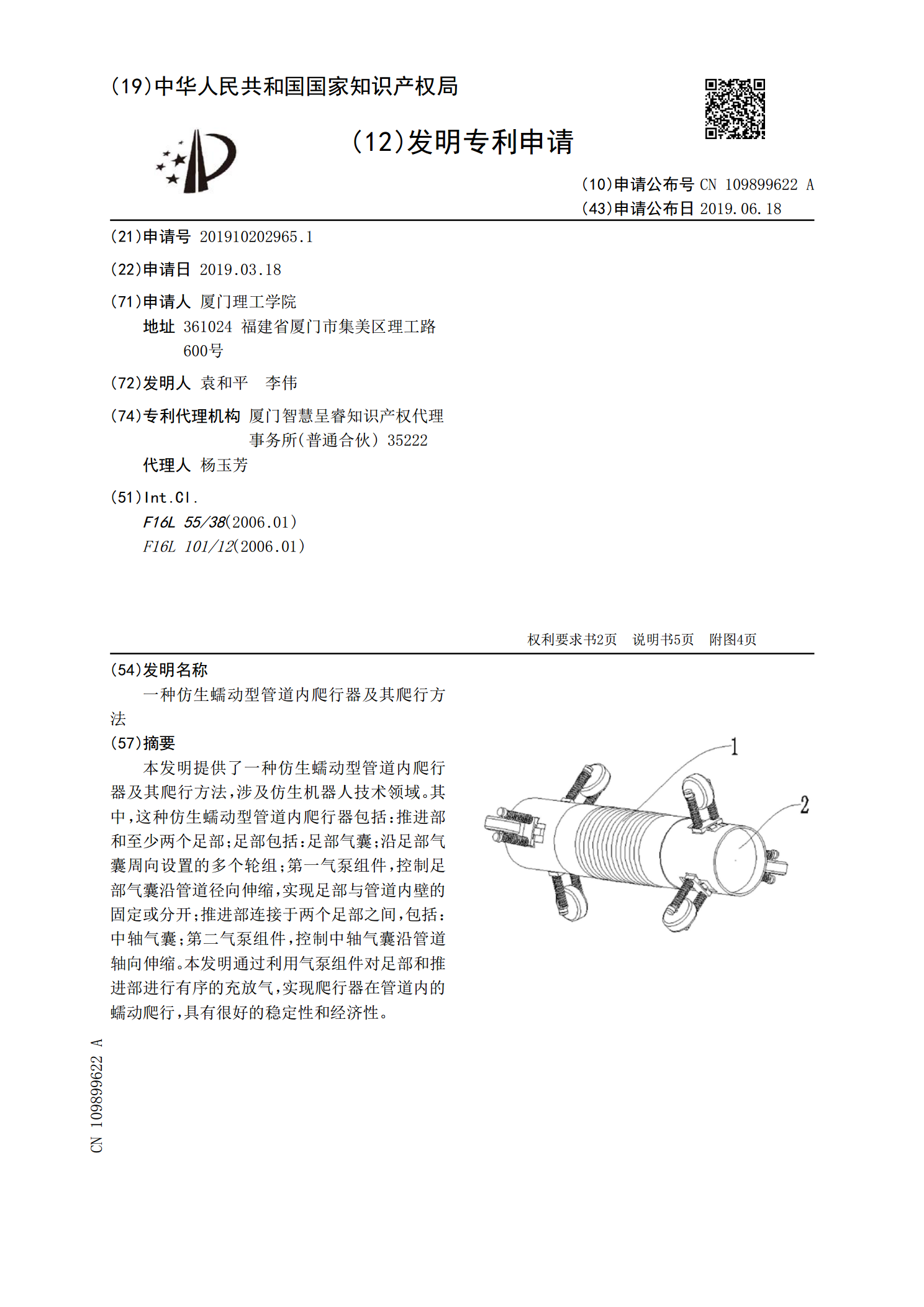
一种仿生蠕动型管道内爬行器及其爬行方法.pdf
本发明提供了一种仿生蠕动型管道内爬行器及其爬行方法,涉及仿生机器人技术领域。其中,这种仿生蠕动型管道内爬行器包括:推进部和至少两个足部;足部包括:足部气囊;沿足部气囊周向设置的多个轮组;第一气泵组件,控制足部气囊沿管道径向伸缩,实现足部与管道内壁的固定或分开;推进部连接于两个足部之间,包括:中轴气囊;第二气泵组件,控制中轴气囊沿管道轴向伸缩。本发明通过利用气泵组件对足部和推进部进行有序的充放气,实现爬行器在管道内的蠕动爬行,具有很好的稳定性和经济性。
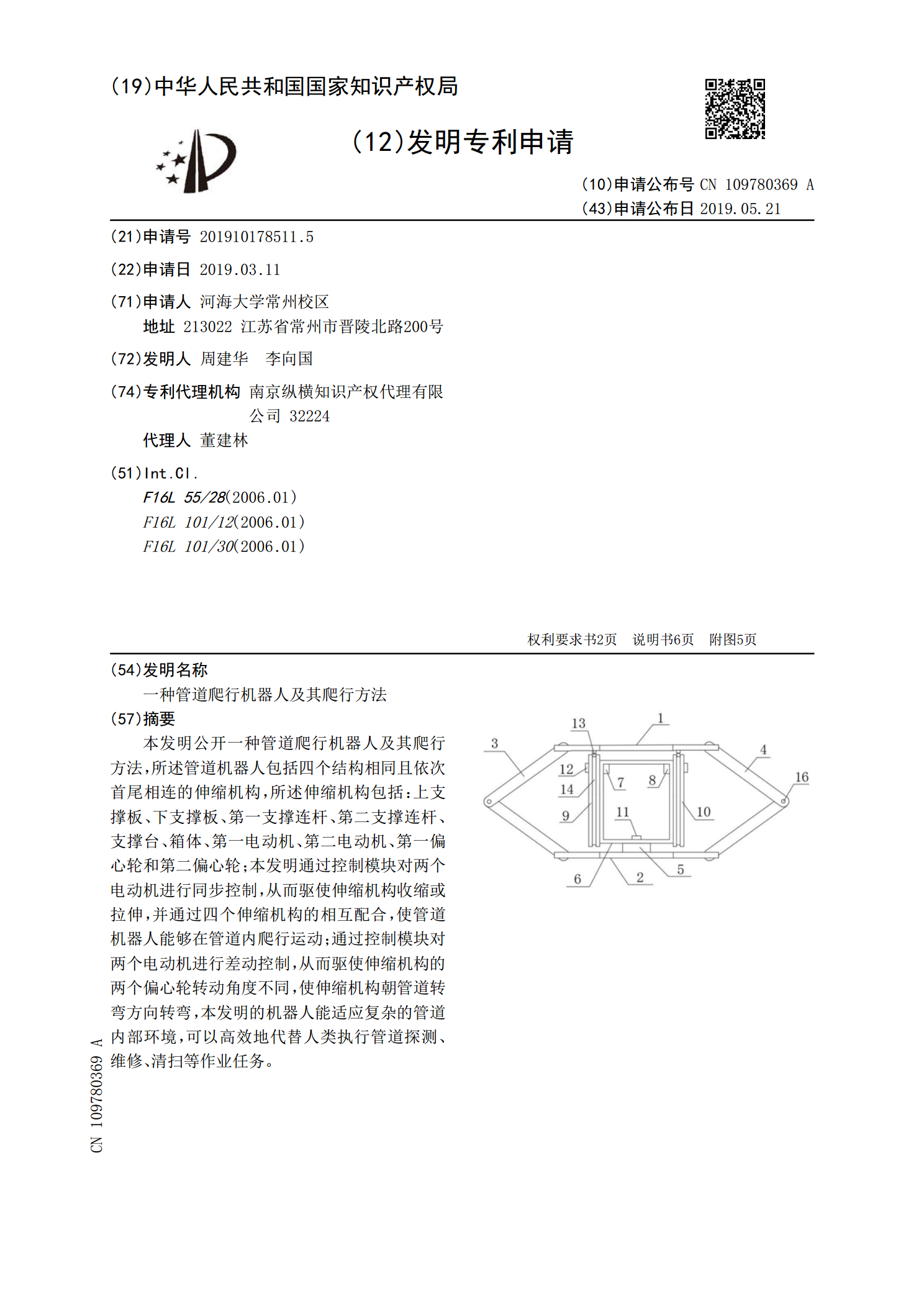
一种管道爬行机器人及其爬行方法.pdf
本发明公开一种管道爬行机器人及其爬行方法,所述管道机器人包括四个结构相同且依次首尾相连的伸缩机构,所述伸缩机构包括:上支撑板、下支撑板、第一支撑连杆、第二支撑连杆、支撑台、箱体、第一电动机、第二电动机、第一偏心轮和第二偏心轮;本发明通过控制模块对两个电动机进行同步控制,从而驱使伸缩机构收缩或拉伸,并通过四个伸缩机构的相互配合,使管道机器人能够在管道内爬行运动;通过控制模块对两个电动机进行差动控制,从而驱使伸缩机构的两个偏心轮转动角度不同,使伸缩机构朝管道转弯方向转弯,本发明的机器人能适应复杂的管道内部环境