
磁带导引AGV的循迹控制系统设计的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁带导引AGV的循迹控制系统设计的开题报告.docx
磁带导引AGV的循迹控制系统设计的开题报告一、前言随着物流、仓储等领域中自动导引车辆的普及,磁带导引AGV已经成为了自动导引车辆的一种重要类型。目前,磁带导引AGV已经在物流、工厂、医疗、超市等多个行业中得到了广泛应用,因为磁带导引AGV可以实现自动导引、货物搬运等一系列操作,极大地提高了生产效率和运作效益。本文将针对磁带导引AGV的循迹控制系统进行设计和实现,并且在实际应用中进行调试和优化,以实现AGV的运行控制、路径规划以及各类异常情况的处理。二、设计方案2.1系统架构磁带导引AGV的循迹控制系统主要
一种基于磁带导引AGV的多曲率圆周路径循迹控制方法.pdf
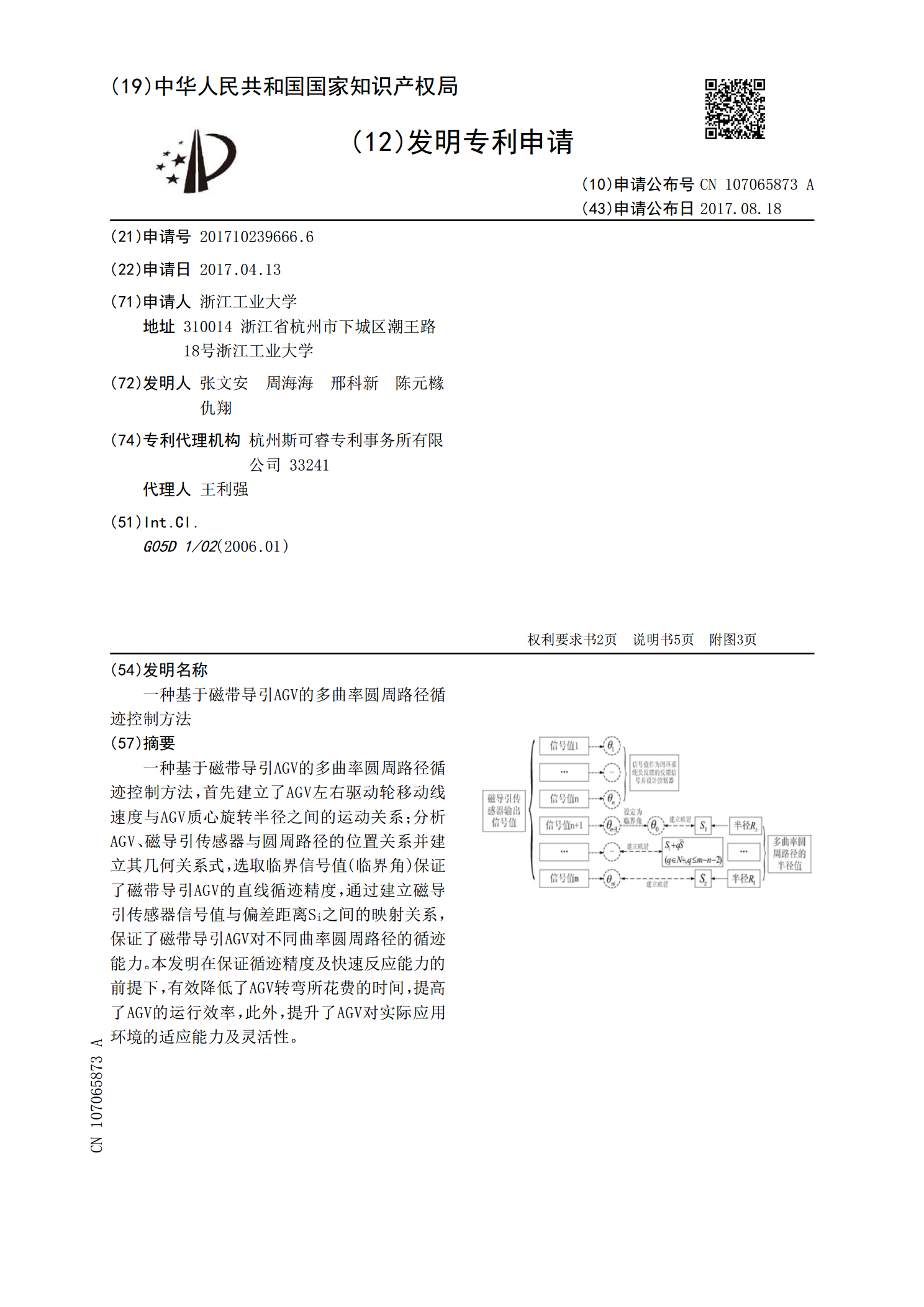
一种基于磁带导引AGV的多曲率圆周路径循迹控制方法,首先建立了AGV左右驱动轮移动线速度与AGV质心旋转半径之间的运动关系;分析AGV、磁导引传感器与圆周路径的位置关系并建立其几何关系式,选取临界信号值(临界角)保证了磁带导引AGV的直线循迹精度,通过建立磁导引传感器信号值与偏差距离S

基于Dijkstra算法的磁带导引AGV路径规划.docx
基于Dijkstra算法的磁带导引AGV路径规划基于Dijkstra算法的磁带导引AGV路径规划摘要:随着物流行业的不断发展,自动导引车(AutomatedGuidedVehicle,AGV)作为一种重要的物流设备在仓储与运输领域中得到了广泛应用。路径规划是AGV系统中的关键问题之一,能否高效准确的规划路径直接关系到AGV系统的性能和效率。本文基于Dijkstra算法对磁带导引AGV路径规划进行研究,并对Dijkstra算法在路径规划中的应用和优势进行了分析和探讨。1.引言自动导引车(AutomatedG

磁导引AGV的设计的中期报告.docx
磁导引AGV的设计的中期报告为了更好地完成磁导引AGV的设计,我们组现在提出了中期报告,以便我们组对接下来的工作进行更好的计划和安排。一、设计要求本次设计磁导引AGV要求能够以一定的速度、精确地遵循磁导航线,在不同的指定站点完成物料的运输任务。具体要求如下:1.安全性:在运行中能够依据环境信息做出合适的反应,确保运行的安全。2.稳定性:具有良好的抗干扰能力,尽可能减少因噪声、电磁干扰等产生的误差对运行的影响。3.精度:能够较为精确地遵循磁导航线行驶,并在指定站点完成任务。4.载荷量:可承载一定重量的物料。

基于HMC1021的磁导引AGV控制系统的设计.docx
基于HMC1021的磁导引AGV控制系统的设计基于HMC1021的磁导引AGV控制系统的设计一、引言自动导引车(AutomaticGuidedVehicle,AGV)是一种自主运行的无人驾驶车辆,可用于物流、制造和仓储等领域。磁导引AGV是一种基于磁力感应技术的导引系统,通过磁导引线和磁感应模块来实现车辆的导引和定位。本论文将介绍基于HMC1021的磁导引AGV控制系统的设计。二、磁导引AGV控制系统的概述磁导引AGV控制系统主要由磁感应模块、控制器和驱动器组成。磁感应模块负责感应磁导引线产生的磁场信号,