
基于Dijkstra算法的磁带导引AGV路径规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Dijkstra算法的磁带导引AGV路径规划.docx
基于Dijkstra算法的磁带导引AGV路径规划基于Dijkstra算法的磁带导引AGV路径规划摘要:随着物流行业的不断发展,自动导引车(AutomatedGuidedVehicle,AGV)作为一种重要的物流设备在仓储与运输领域中得到了广泛应用。路径规划是AGV系统中的关键问题之一,能否高效准确的规划路径直接关系到AGV系统的性能和效率。本文基于Dijkstra算法对磁带导引AGV路径规划进行研究,并对Dijkstra算法在路径规划中的应用和优势进行了分析和探讨。1.引言自动导引车(AutomatedG

基于改进Dijkstra算法的AGV路径规划研究.docx
基于改进Dijkstra算法的AGV路径规划研究摘要AGV(自动导引车)是近年来在物流行业中越来越普及的一种物流设备,它通过自动化技术,实现对物流运输过程的全程控制。路径规划是AGV系统中的核心环节,其决定了AGV系统的运行效率。本文基于改进Dijkstra算法的思想,研究了AGV路径规划的优化方法,并通过实验验证了算法的有效性。关键词:AGV;路径规划;改进Dijkstra算法;优化方法。1.引言近年来,随着物流行业的快速发展,AGV的普及率也越来越高,成为了物流行业中不可或缺的一部分。在AGV中,路径

优化Dijkstra算法在工厂内物流AGV路径规划的研究.docx
优化Dijkstra算法在工厂内物流AGV路径规划的研究随着工业自动化和智能化的发展,工厂内物流AGV已经成为了现代制造业中不可缺少的一部分。而在工厂内,物流AGV的路径规划是至关重要的。传统的路径规划算法Dijkstra算法在工厂内物流AGV路径规划中表现较好,但存在一些问题。因此,本文将讨论关于如何优化Dijkstra算法在工厂内物流AGV路径规划中的应用。1.Dijkstra算法的优点Dijkstra算法属于单源最短路径算法,能够计算出源点到其他所有点的最短路径。在工厂内物流AGV路径规划中,起点和

一种基于Dijkstra算法的路径优选AGV搬运系统.pdf
一种基于Dijkstra算法的路径优选AGV搬运系统,包括车间、AGV小车、无线通讯模块以及运行Dijkstra算法的上位机,其特征在于:车间内部地面贴有色带轨道并且设置有多个位于工位处的工位,该色带轨道用于AGV小车以光学传感器(7)读取地面色带路径信息实现导航,AGV小车主要由车架(3)、控制器模块(1)、避障系统、驱动机构、升降机构、从动轮(10)、无线通讯模块以及触摸屏(2)构成。实现了色带寻迹方式、RFID标签的定位方式,并且触摸屏2的使用也极大的方便现场人员调试。在多AGV搬运系统中同样适用,
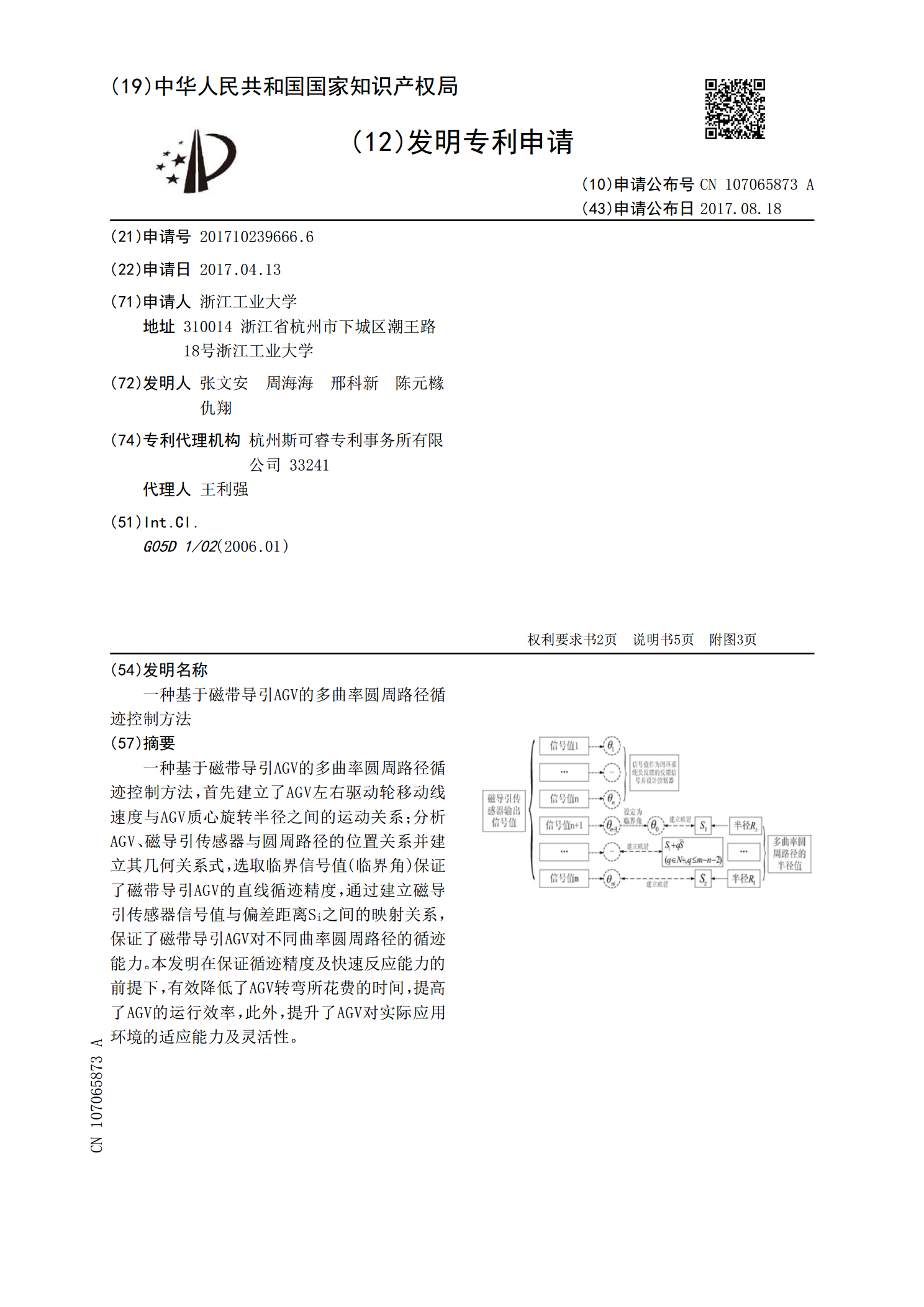
一种基于磁带导引AGV的多曲率圆周路径循迹控制方法.pdf
一种基于磁带导引AGV的多曲率圆周路径循迹控制方法,首先建立了AGV左右驱动轮移动线速度与AGV质心旋转半径之间的运动关系;分析AGV、磁导引传感器与圆周路径的位置关系并建立其几何关系式,选取临界信号值(临界角)保证了磁带导引AGV的直线循迹精度,通过建立磁导引传感器信号值与偏差距离S