
四轮全驱式管道机器人研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四轮全驱式管道机器人研究的开题报告.docx
四轮全驱式管道机器人研究的开题报告一、研究背景随着管道类工业的不断发展,在管道安全、管道检测以及管道维护方面迫切需要一种高效、安全、稳定的机器人。传统的管道检测方式十分繁琐且化繁为简,普及程度有限。而四轮全驱式管道机器人的出现,使得管道的检测、维护等工作更加准确、稳定、高效。二、研究目的本篇研究将致力于四轮全驱式管道机器人的探索和研究,解决传统检查方式的故障和不足,为日后实现对管道的安全管理和监测提供坚实的技术基础。具体目标如下:1.设计并实现一套稳定、可靠、高效的四轮全驱式管道机器人。2.通过测试验证机

全驱蠕动式管道机器人.pdf
本发明的全驱蠕动式管道机器人包括单元节和连接单元节的万向节,单元节包括安装架、轮腿组件、锁止组件和传动组件,轮腿组件、锁止组件和传动组件安装于安装架上,其中轮腿组件用于支撑机器人在管道内壁行走,锁止组件用于锁定单元节,传动组件用于根据电机驱动带动锁止组件动作和单元节相对运动。有益效果在于:单元节中采用的具有内外螺纹的螺管和传动丝杆与锁紧架配合,通过电机驱动其正反转,实现了前后单元节交替锁止。并使机器人产生伸缩前进或后退运动。本发明采用单电机驱动方式,有效的减少了动力源,缩小了机器人体积,减小了能耗,使之更

全隐式化学驱油藏数值模拟研究的开题报告.docx
全隐式化学驱油藏数值模拟研究的开题报告题目:全隐式化学驱油藏数值模拟研究一、研究背景随着我国油气资源逐渐进入中后期开发阶段,一些传统的采油方案已无法满足复杂油藏开发的需求,因此化学驱油技术愈加受到人们的关注,成为油田开发中极为活跃的领域之一。化学驱油作为一种有机的油藏增产方式,由于其操作方便、效果显著、适用性广泛等优势,得到了越来越多的应用和推广。数值模拟在化学驱油工艺的优化设计、新工艺开发和油藏最优开发方式的确定等方面展示了其不可替代的作用,因此开展全隐式化学驱油藏数值模拟研究至关重要。二、研究内容和目
全强支撑型单驱双向蠕行式管道清理机器人.pdf
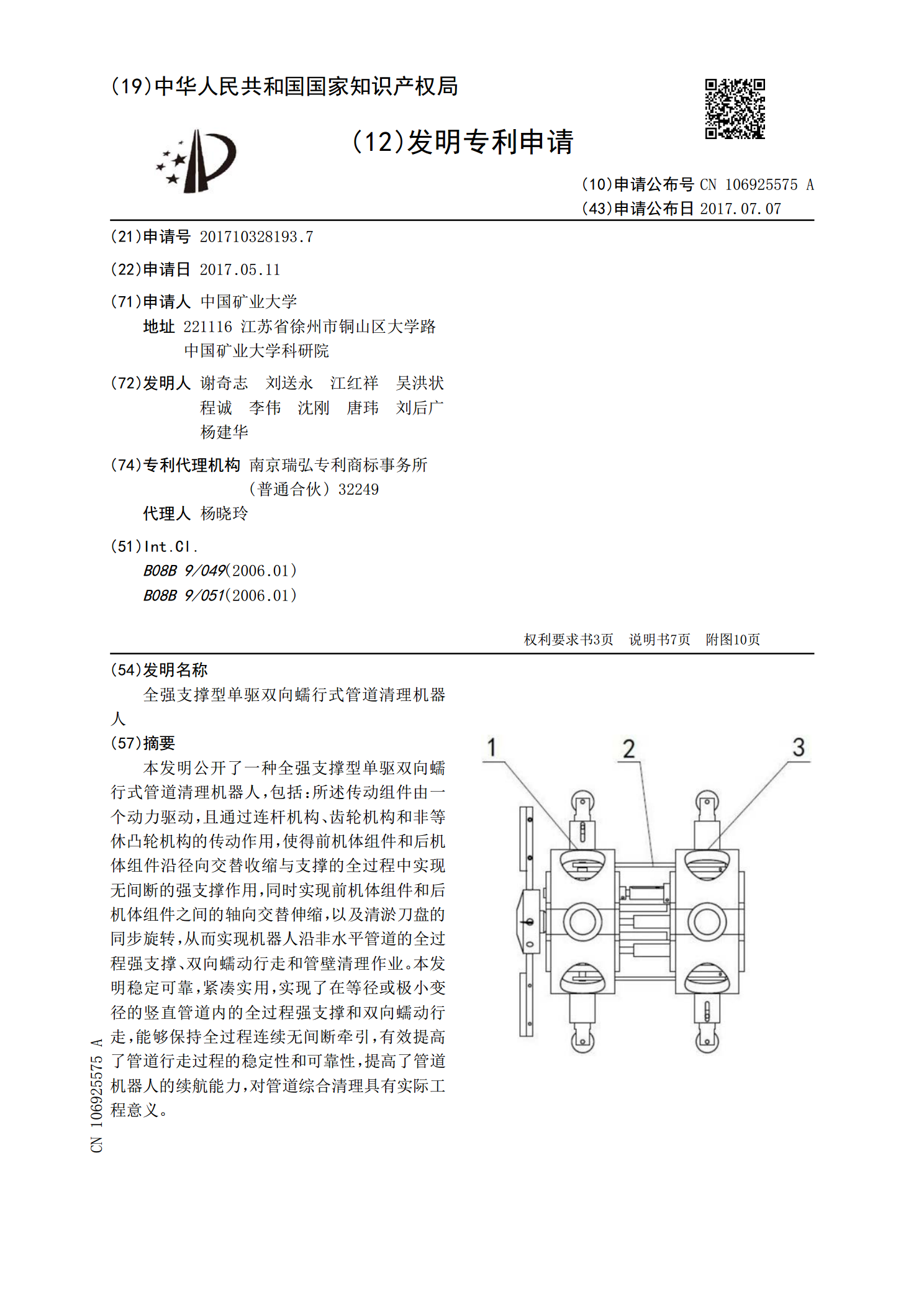
本发明公开了一种全强支撑型单驱双向蠕行式管道清理机器人,包括:所述传动组件由一个动力驱动,且通过连杆机构、齿轮机构和非等休凸轮机构的传动作用,使得前机体组件和后机体组件沿径向交替收缩与支撑的全过程中实现无间断的强支撑作用,同时实现前机体组件和后机体组件之间的轴向交替伸缩,以及清淤刀盘的同步旋转,从而实现机器人沿非水平管道的全过程强支撑、双向蠕动行走和管壁清理作业。本发明稳定可靠,紧凑实用,实现了在等径或极小变径的竖直管道内的全过程强支撑和双向蠕动行走,能够保持全过程连续无间断牵引,有效提高了管道行走过程的

磁齿轮复合电机直驱式SCARA机器人研制的开题报告.docx
磁齿轮复合电机直驱式SCARA机器人研制的开题报告一、研究背景和意义SCARA机器人是具有诸多优势的工业机器人,被广泛应用于装配、生产、质检等领域。然而,传统的SCARA机器人由于传动方式受到机械传动器件和齿轮箱的限制,往往存在一些缺点,如速度、精度、可靠性等方面的瓶颈。磁齿轮复合电机作为新型电力传动技术已经在发动机、直升机、飞机等应用,具有高效、小型化、高可靠性、低能耗等多个优点。本研究旨在将磁齿轮复合电机应用于SCARA机器人的驱动系统中,研发一种新型直驱式SCARA机器人,旨在解决传统SCARA机器