
磁齿轮复合电机直驱式SCARA机器人研制的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

磁齿轮复合电机直驱式SCARA机器人研制的开题报告.docx
磁齿轮复合电机直驱式SCARA机器人研制的开题报告一、研究背景和意义SCARA机器人是具有诸多优势的工业机器人,被广泛应用于装配、生产、质检等领域。然而,传统的SCARA机器人由于传动方式受到机械传动器件和齿轮箱的限制,往往存在一些缺点,如速度、精度、可靠性等方面的瓶颈。磁齿轮复合电机作为新型电力传动技术已经在发动机、直升机、飞机等应用,具有高效、小型化、高可靠性、低能耗等多个优点。本研究旨在将磁齿轮复合电机应用于SCARA机器人的驱动系统中,研发一种新型直驱式SCARA机器人,旨在解决传统SCARA机器

磁齿轮复合电机直驱式SCARA机器人研制.docx
磁齿轮复合电机直驱式SCARA机器人研制磁齿轮复合电机直驱式SCARA机器人研制摘要:随着工业自动化的不断发展,机器人技术在生产线上的应用越来越广泛。为了提高机器人的精准度和工作效率,研发直驱式SCARA机器人成为一个重要的方向。本论文以磁齿轮复合电机直驱式SCARA机器人的研制为课题,探讨了其优势和关键技术。1.引言直驱式SCARA机器人是一种具有高精度的工业机器人,用于在生产线上执行精确而重复的操作。传统的SCARA机器人使用传动器件传递动力,如减速器和传动带,但这些传动器件会造成能量损失和机械零件的

磁齿轮复合电机直驱式SCARA机器人研制的任务书.docx
磁齿轮复合电机直驱式SCARA机器人研制的任务书任务书磁齿轮复合电机直驱式SCARA机器人的研制一、背景工业机器人自20世纪50年代开始发展,经过多年的发展,已成为现代工业生产线装备中不可或缺的重要组成部分。SCARA机器人作为工业机器人中的一种主流类型,广泛应用于电子、电器、汽车、食品等行业中。磁齿轮复合电机直驱技术是目前机器人驱动技术领域的前沿技术,其具有速度快、精度高、能耗低等优点,在工业机器人技术中也得到了广泛应用。因此,研制磁齿轮复合电机直驱式SCARA机器人具有十分重要的意义。二、任务目标本项

基于磁齿轮的低速大转矩直驱复合电机.pdf
本发明涉及磁齿轮传动系统领域,提供了一种基于磁齿轮的低速大转矩直驱复合电机,包括圆形机壳(1)、沿圆周方向均匀嵌在圆形机壳(1)内壁基于磁齿轮的新型低速大转矩直驱复合电机中的调磁环(2)、与圆形机壳(1)相连的支撑环(9)、电枢绕组(3)和转子;支撑环(9)包括与圆形机壳(1)相连的第一连接部(91)、自该第一连接部(91)垂直延伸的支撑部(93)和与支撑部(93)相连且平行于第一连接部(91)的第二连接部(92),电枢绕组(3)放置在支撑部(93)上,转子与第二连接部(92)相连。减小了电机的体积、重量
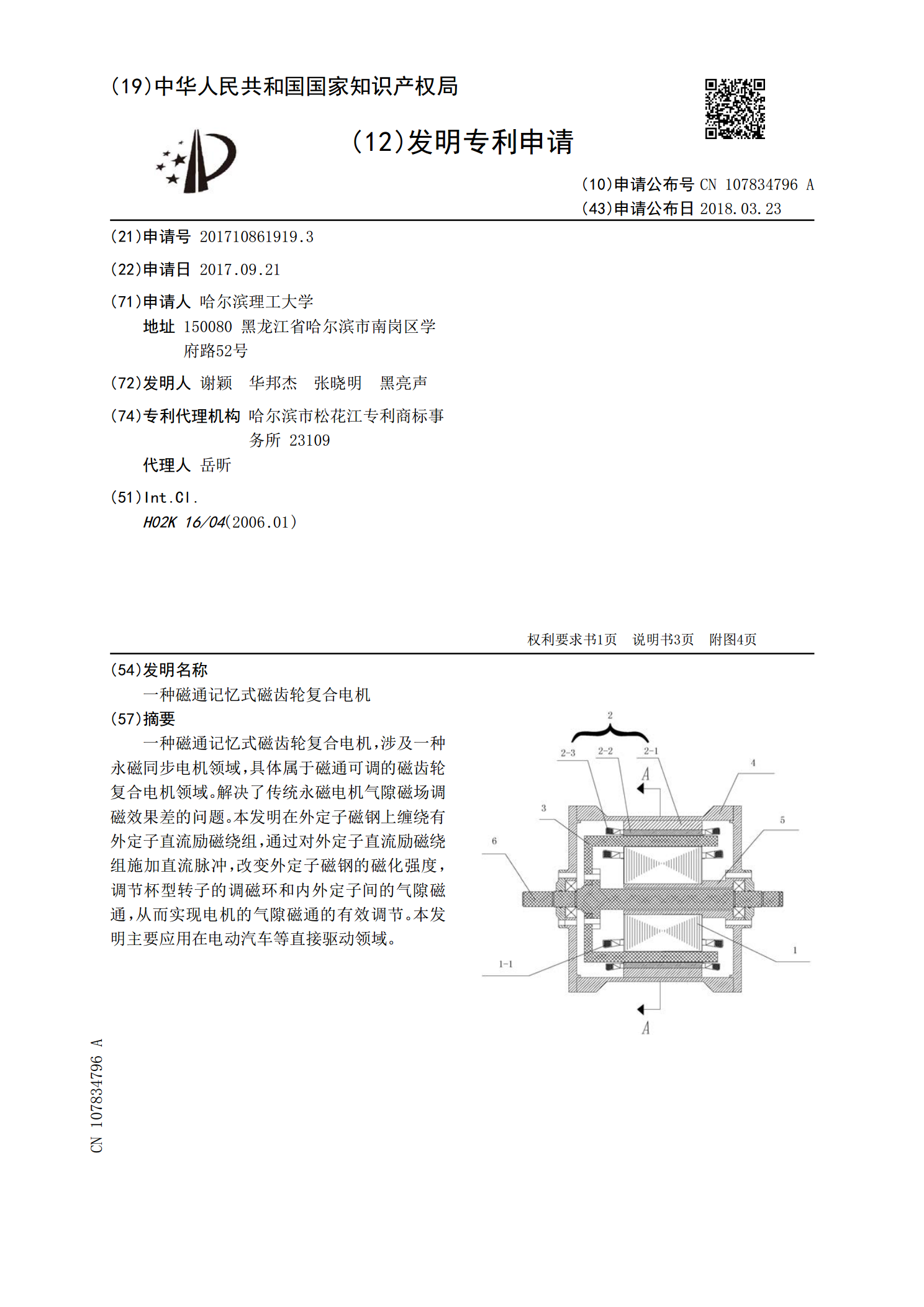
一种磁通记忆式磁齿轮复合电机.pdf
一种磁通记忆式磁齿轮复合电机,涉及一种永磁同步电机领域,具体属于磁通可调的磁齿轮复合电机领域。解决了传统永磁电机气隙磁场调磁效果差的问题。本发明在外定子磁钢上缠绕有外定子直流励磁绕组,通过对外定子直流励磁绕组施加直流脉冲,改变外定子磁钢的磁化强度,调节杯型转子的调磁环和内外定子间的气隙磁通,从而实现电机的气隙磁通的有效调节。本发明主要应用在电动汽车等直接驱动领域。