
全驱蠕动式管道机器人.pdf

Ma****57


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全驱蠕动式管道机器人.pdf
本发明的全驱蠕动式管道机器人包括单元节和连接单元节的万向节,单元节包括安装架、轮腿组件、锁止组件和传动组件,轮腿组件、锁止组件和传动组件安装于安装架上,其中轮腿组件用于支撑机器人在管道内壁行走,锁止组件用于锁定单元节,传动组件用于根据电机驱动带动锁止组件动作和单元节相对运动。有益效果在于:单元节中采用的具有内外螺纹的螺管和传动丝杆与锁紧架配合,通过电机驱动其正反转,实现了前后单元节交替锁止。并使机器人产生伸缩前进或后退运动。本发明采用单电机驱动方式,有效的减少了动力源,缩小了机器人体积,减小了能耗,使之更
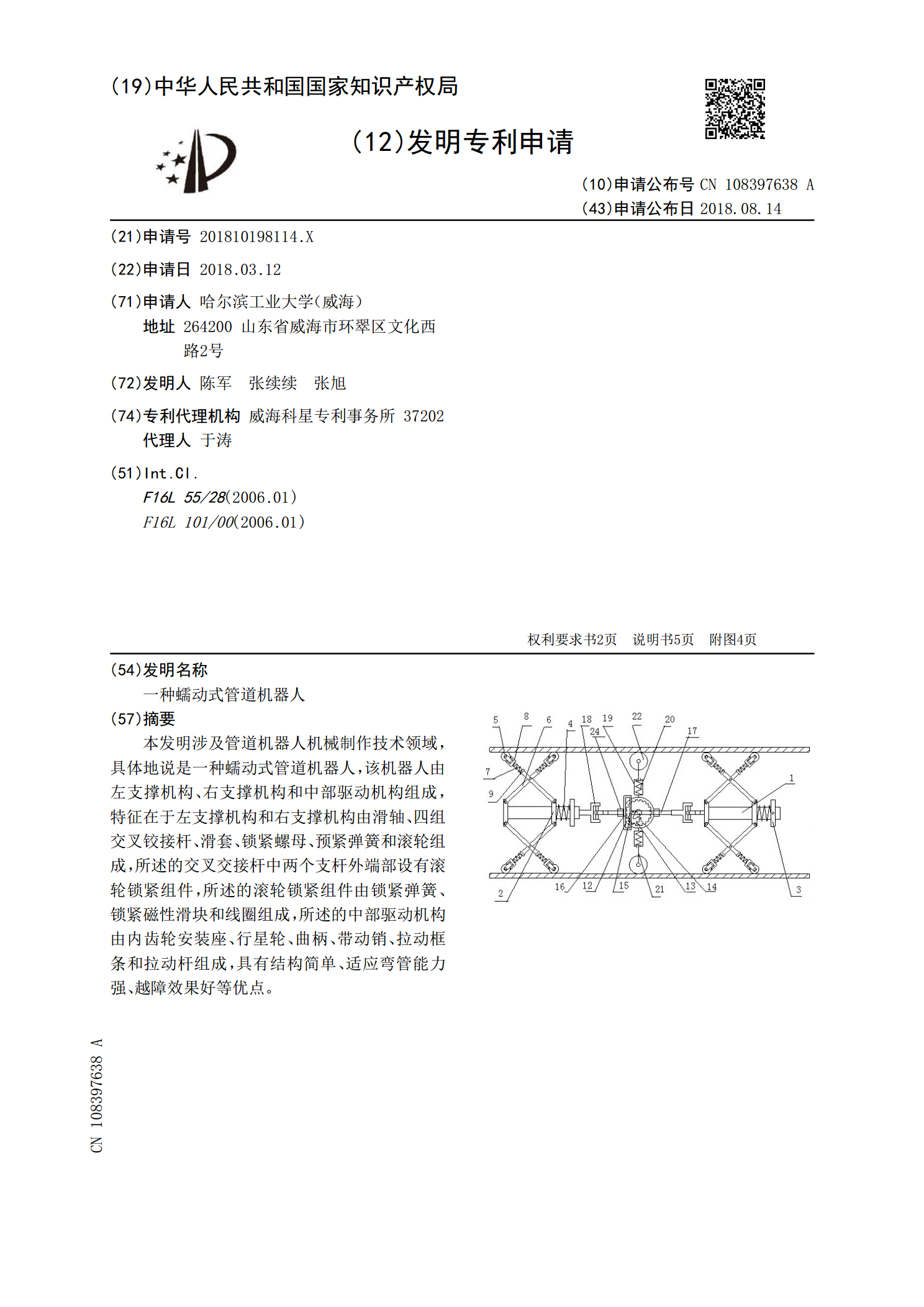
一种蠕动式管道机器人.pdf
本发明涉及管道机器人机械制作技术领域,具体地说是一种蠕动式管道机器人,该机器人由左支撑机构、右支撑机构和中部驱动机构组成,特征在于左支撑机构和右支撑机构由滑轴、四组交叉铰接杆、滑套、锁紧螺母、预紧弹簧和滚轮组成,所述的交叉交接杆中两个支杆外端部设有滚轮锁紧组件,所述的滚轮锁紧组件由锁紧弹簧、锁紧磁性滑块和线圈组成,所述的中部驱动机构由内齿轮安装座、行星轮、曲柄、带动销、拉动框条和拉动杆组成,具有结构简单、适应弯管能力强、越障效果好等优点。
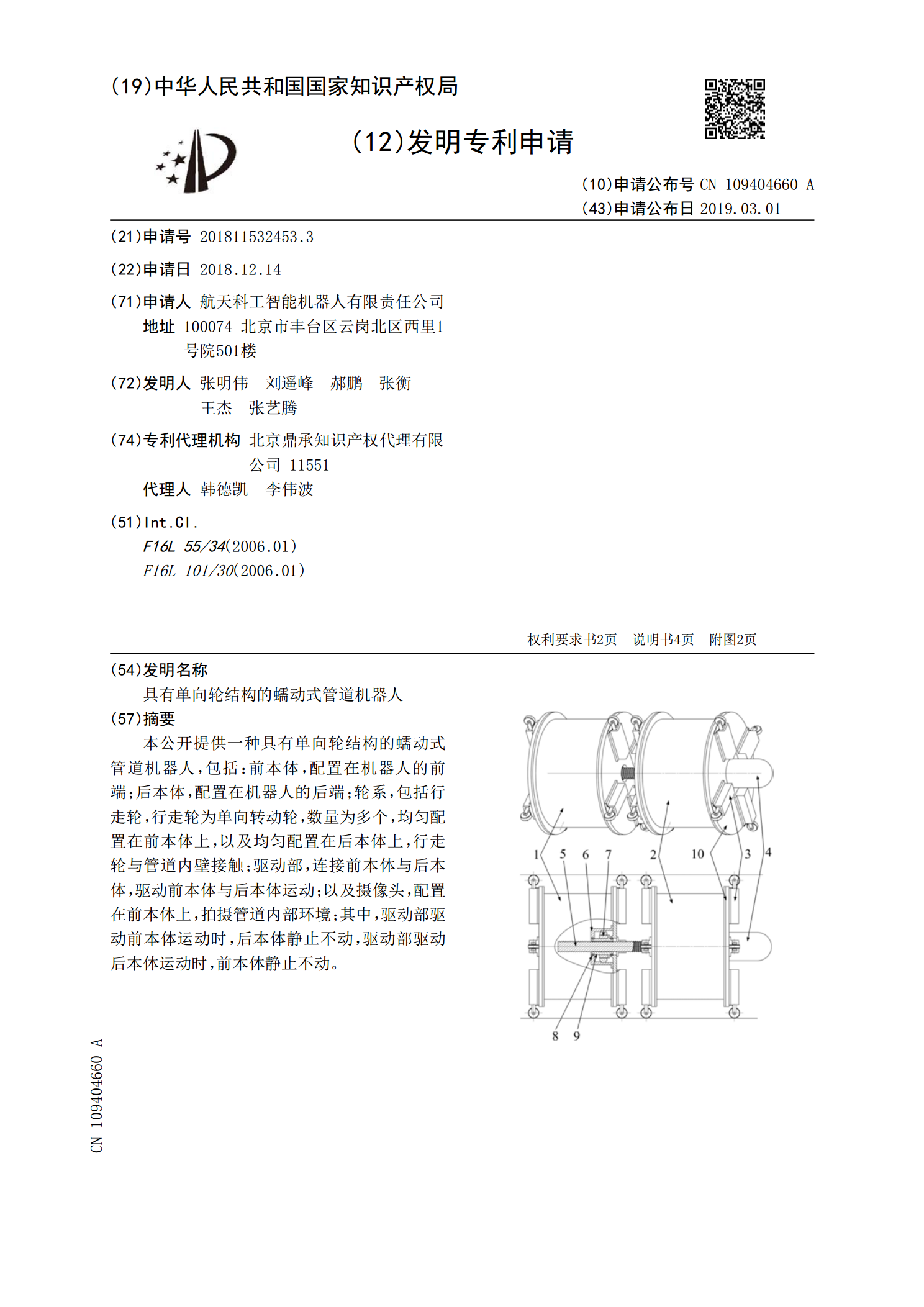
具有单向轮结构的蠕动式管道机器人.pdf
本公开提供一种具有单向轮结构的蠕动式管道机器人,包括:前本体,配置在机器人的前端;后本体,配置在机器人的后端;轮系,包括行走轮,行走轮为单向转动轮,数量为多个,均匀配置在前本体上,以及均匀配置在后本体上,行走轮与管道内壁接触;驱动部,连接前本体与后本体,驱动前本体与后本体运动;以及摄像头,配置在前本体上,拍摄管道内部环境;其中,驱动部驱动前本体运动时,后本体静止不动,驱动部驱动后本体运动时,前本体静止不动。

四轮全驱式管道机器人研究的开题报告.docx
四轮全驱式管道机器人研究的开题报告一、研究背景随着管道类工业的不断发展,在管道安全、管道检测以及管道维护方面迫切需要一种高效、安全、稳定的机器人。传统的管道检测方式十分繁琐且化繁为简,普及程度有限。而四轮全驱式管道机器人的出现,使得管道的检测、维护等工作更加准确、稳定、高效。二、研究目的本篇研究将致力于四轮全驱式管道机器人的探索和研究,解决传统检查方式的故障和不足,为日后实现对管道的安全管理和监测提供坚实的技术基础。具体目标如下:1.设计并实现一套稳定、可靠、高效的四轮全驱式管道机器人。2.通过测试验证机
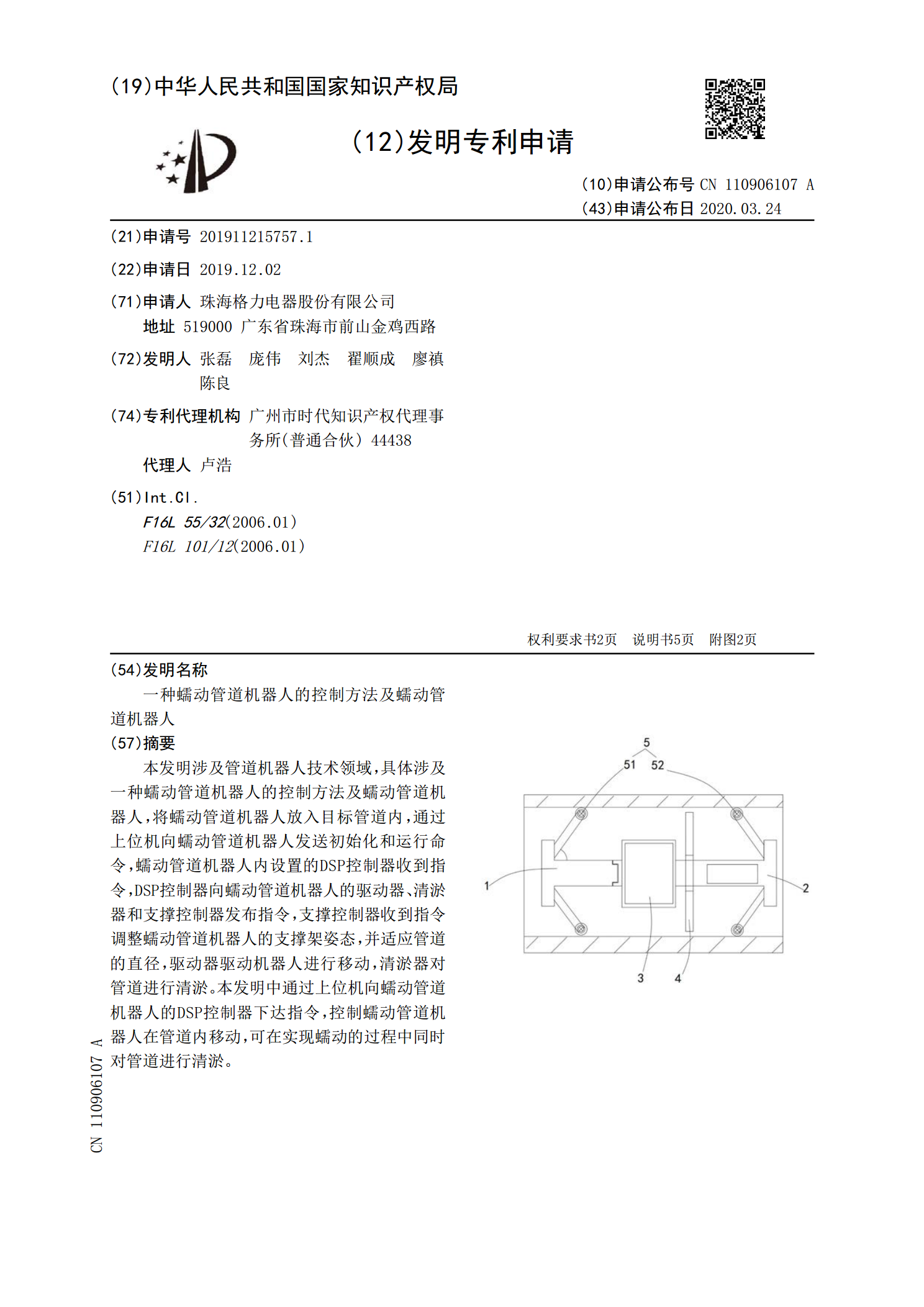
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道