
基于滑模变结构控制的汽车随动后视镜系统研究的任务书.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于滑模变结构控制的汽车随动后视镜系统研究.docx
基于滑模变结构控制的汽车随动后视镜系统研究基于滑模变结构控制的汽车随动后视镜系统研究摘要:随动后视镜系统是汽车中重要的被动安全装置之一,它能够通过跟踪车辆后方的动态行为,提供更广阔的视野,减少盲区,增强驾驶者的安全感。本文针对传统后视镜系统存在的不足,提出基于滑模变结构控制的汽车随动后视镜系统研究。使用滑模变结构控制方法可以有效克服传统后视镜系统中的冗余和限制,提高后视镜系统的鲁棒性和精确度。通过实验验证,表明基于滑模变结构控制的汽车随动后视镜系统能够稳定跟踪目标并提供更广阔的视野,具备良好的安全性和实用

基于滑模变结构控制的汽车随动后视镜系统研究的任务书.docx
基于滑模变结构控制的汽车随动后视镜系统研究的任务书一、研究背景及意义随着现代汽车的普及,配备随动后视镜的车辆也越来越多。随动后视镜可以随着车辆运动变换角度,使驾驶员能够获得更好的视野,提高行驶安全性。但是现有的后视镜随动控制系统一般都存在响应慢、鲁棒性差等问题,无法满足实际使用需求。因此,本研究将基于滑模变结构控制的方法,对汽车随动后视镜控制系统进行研究,提高其性能和鲁棒性,为车辆行驶安全提供技术支持。二、研究内容及方法1.掌握随动后视镜原理和运动规律,确定采用的数学模型。2.基于滑模变结构控制理论,设计

基于滑模变结构控制的汽车随动后视镜系统研究的开题报告.docx
基于滑模变结构控制的汽车随动后视镜系统研究的开题报告一、研究背景随着车辆行驶速度的提高,汽车行驶时遇到的道路情况和交通状况也越来越复杂,特别是车辆换道变道时需要接收更新的信息。因此,汽车随动后视镜的应用越来越受到关注。随动后视镜系统通常由图像采集单元、图像处理单元、控制器和执行单元等组成。其中,控制器的设计对随动后视镜系统的稳定性和控制性能具有重要的影响。滑模控制是一种具有鲁棒性能的控制方法,在工业控制中广泛应用。该控制方法通过引入滑模面来使系统状态达到期望状态。此外,滑模控制不仅能够克服系统参数变化、未
汽车后视镜的随动方法及汽车随动后视镜.pdf
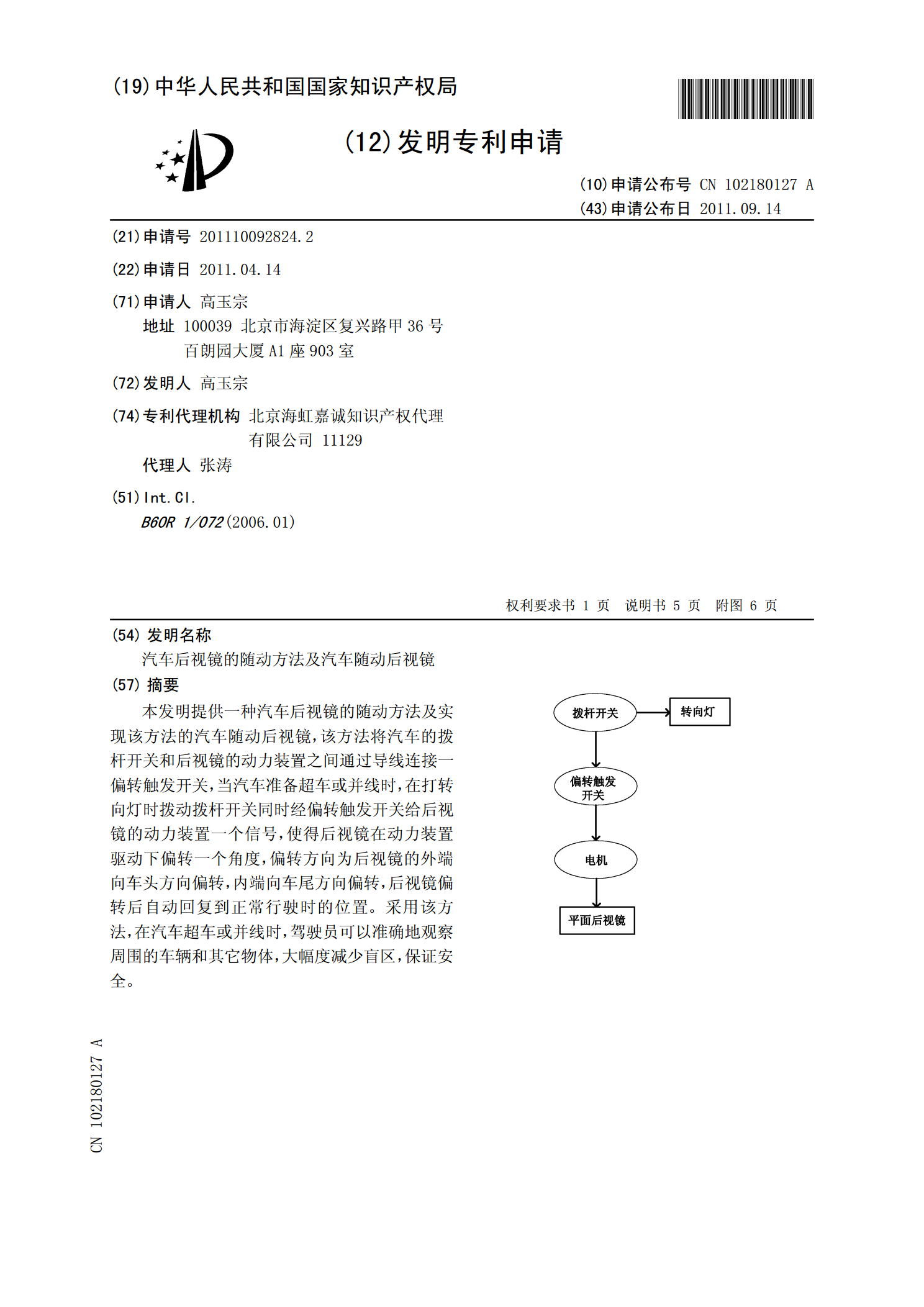
本发明提供一种汽车后视镜的随动方法及实现该方法的汽车随动后视镜,该方法将汽车的拨杆开关和后视镜的动力装置之间通过导线连接一偏转触发开关,当汽车准备超车或并线时,在打转向灯时拨动拨杆开关同时经偏转触发开关给后视镜的动力装置一个信号,使得后视镜在动力装置驱动下偏转一个角度,偏转方向为后视镜的外端向车头方向偏转,内端向车尾方向偏转,后视镜偏转后自动回复到正常行驶时的位置。采用该方法,在汽车超车或并线时,驾驶员可以准确地观察周围的车辆和其它物体,大幅度减少盲区,保证安全。

基于滑模变结构控制的电动汽车稳定性控制系统研究的任务书.docx
基于滑模变结构控制的电动汽车稳定性控制系统研究的任务书任务书项目名称:基于滑模变结构控制的电动汽车稳定性控制系统研究任务负责人:XXX任务执行人:XXX任务起始时间:XX年XX月XX日任务结束时间:XX年XX月XX日任务内容:随着电动汽车技术的发展,电动汽车成为了汽车行业的一个重要方向。但是,随着电动汽车的普及,电动汽车在稳定性、安全性等方面也面临着新的挑战。因此,本项目旨在开发一种基于滑模变结构控制的电动汽车稳定性控制系统,从而提高电动汽车的安全性和稳定性。本项目的主要任务包括:1.研究电动汽车的动力学