
基于滑模变结构控制的汽车随动后视镜系统研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于滑模变结构控制的汽车随动后视镜系统研究的开题报告.docx
基于滑模变结构控制的汽车随动后视镜系统研究的开题报告一、研究背景随着车辆行驶速度的提高,汽车行驶时遇到的道路情况和交通状况也越来越复杂,特别是车辆换道变道时需要接收更新的信息。因此,汽车随动后视镜的应用越来越受到关注。随动后视镜系统通常由图像采集单元、图像处理单元、控制器和执行单元等组成。其中,控制器的设计对随动后视镜系统的稳定性和控制性能具有重要的影响。滑模控制是一种具有鲁棒性能的控制方法,在工业控制中广泛应用。该控制方法通过引入滑模面来使系统状态达到期望状态。此外,滑模控制不仅能够克服系统参数变化、未

基于滑模变结构控制的异步电机调速系统研究的开题报告.docx
基于滑模变结构控制的异步电机调速系统研究的开题报告一、选题背景及意义随着工业自动化的发展,异步电机在工业生产中得到了广泛应用。异步电机在工业生产中具有运行可靠、噪声小、维护方便等优点,成为了工业生产的重要动力设备之一。异步电机调速系统就是控制异步电机的电力电子调速系统,其性能的优劣直接影响到生产效率和能源消耗。因此研究异步电机调速系统的控制方法及其性能优化具有重要的理论和应用价值。目前,针对异步电机调速系统的控制方法有很多,常见的有PID控制、模糊控制、神经网络控制等。其中,滑模变结构控制被广泛应用于不确

基于滑模变结构控制的叉车线控转向系统研究的开题报告.docx
基于滑模变结构控制的叉车线控转向系统研究的开题报告一、选题背景随着物流业的蓬勃发展,叉车已成为重要的物流设备。在叉车的运行过程中,转向系统是其中一个不可或缺的部分。目前市面上的叉车转向系统采用电动或液压方式,性能表现较为稳定。然而,在崎岖不平的场地或高速行驶状态下,转向系统将难以保持稳定,存在性能下降或失控等问题。因此,叉车转向系统的研究具有重要意义。滑模变结构控制是一种在模型不确定或存在干扰情况下仍能保证稳定性能的控制方法。由于叉车转向系统面临的环境复杂多变,因此采用滑模变结构控制方法有望有效应对转向系

基于滑模变结构的机器人关节控制系统研究的开题报告.docx
基于滑模变结构的机器人关节控制系统研究的开题报告一、选题背景随着机器人技术的快速发展,机器人在工业、医疗、服务等领域中的应用越来越广泛。机器人的关节控制系统是机器人控制的核心之一,直接影响机器人的动作精度和性能。目前,常用的机器人关节控制方法有经典的PID控制、模糊控制、自适应控制等。然而,这些方法都有一定的缺点,如控制精度低、鲁棒性差、易受外部干扰等。因此,需要寻找一种更为有效的控制方式来提高机器人关节控制的性能和稳定性。二、选题意义滑模变结构控制方法是一种具有优越控制性能和鲁棒性的控制方法。在机器人关
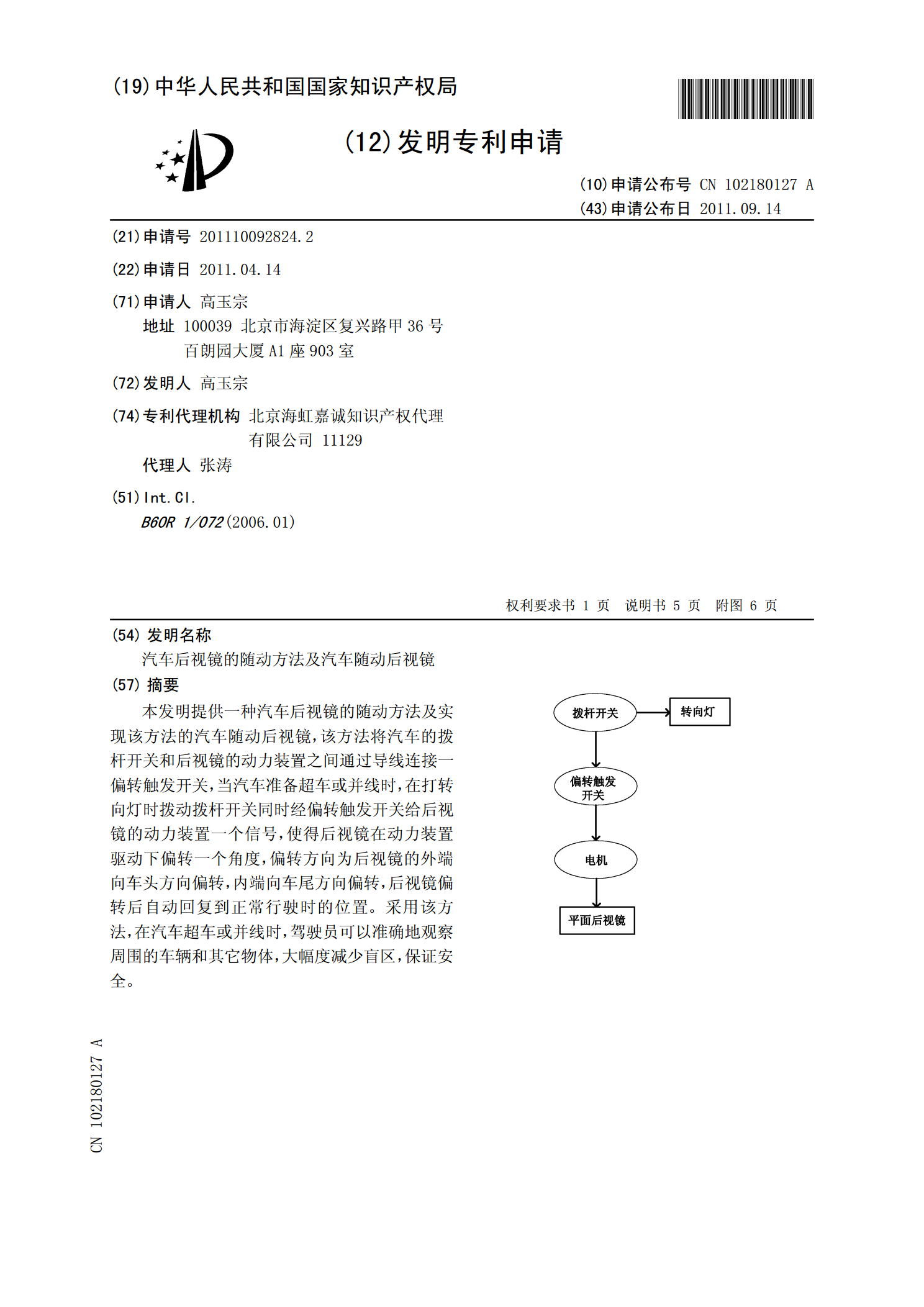
汽车后视镜的随动方法及汽车随动后视镜.pdf
本发明提供一种汽车后视镜的随动方法及实现该方法的汽车随动后视镜,该方法将汽车的拨杆开关和后视镜的动力装置之间通过导线连接一偏转触发开关,当汽车准备超车或并线时,在打转向灯时拨动拨杆开关同时经偏转触发开关给后视镜的动力装置一个信号,使得后视镜在动力装置驱动下偏转一个角度,偏转方向为后视镜的外端向车头方向偏转,内端向车尾方向偏转,后视镜偏转后自动回复到正常行驶时的位置。采用该方法,在汽车超车或并线时,驾驶员可以准确地观察周围的车辆和其它物体,大幅度减少盲区,保证安全。