
分布式电驱动汽车转矩协调控制研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

分布式电驱动汽车转矩协调控制研究的开题报告.docx
分布式电驱动汽车转矩协调控制研究的开题报告一、研究背景近年来,随着全球汽车工业的发展,电气化已成为国际汽车工业的一个明显趋势。在这个过程中,分布式电驱动技术已经成为了一种核心技术。它将整个动力系统分为多个子系统,每个子系统都由电动机驱动,通过电机控制器来实现电机的运行。分布式电驱动技术不仅有助于提高汽车性能,还能够优化车辆的热管理。同时,分布式电驱动技术还能够突破传统汽车控制结构,提高车辆的灵活性和稳定性。分布式电驱动汽车在车辆控制方面具有独特的优势。比如,传统的中央式电驱动配置结构,容易发生单点故障,而

采用电动轮驱动的电动汽车转矩协调控制研究.docx
采用电动轮驱动的电动汽车转矩协调控制研究一、概述随着全球环境保护意识的增强以及传统化石能源的日渐枯竭,电动汽车作为一种清洁、高效的交通方式,正逐渐受到人们的青睐。在电动汽车的发展过程中,驱动方式的选择尤为关键。传统的内燃机驱动方式虽然技术成熟,但存在排放污染、能源效率低等问题。而电动轮驱动作为一种新兴的电动汽车驱动方式,以其独特的优势,如结构紧凑、控制灵活、能量利用率高等,正逐渐成为电动汽车驱动技术的重要发展方向。电动轮驱动技术是指将电动机直接集成在车轮内部,通过电动机直接驱动车轮转动。这种驱动方式省去了

分布式驱动电动汽车的驱动防滑研究的开题报告.docx
分布式驱动电动汽车的驱动防滑研究的开题报告一、研究背景随着电动汽车的快速发展,越来越多的人开始选择购买这种环保、低碳、经济的出行方式。然而,电动汽车在实际驾驶过程中,仍然存在着一些技术难题,其中之一就是驱动防滑方面的问题。因此,本文旨在研究分布式驱动电动汽车的驱动防滑技术,以提高电动汽车的行驶安全性和驾驶体验。二、研究目的本文旨在研究分布式驱动电动汽车的驱动防滑技术,探讨其原理及应用,通过实验对该技术进行验证和分析,最终得出该技术的可行性和优越性,为电动汽车的发展提供具有实际应用价值的参考意见。三、研究内
分布式驱动电动汽车转矩矢量分配控制方法.pdf
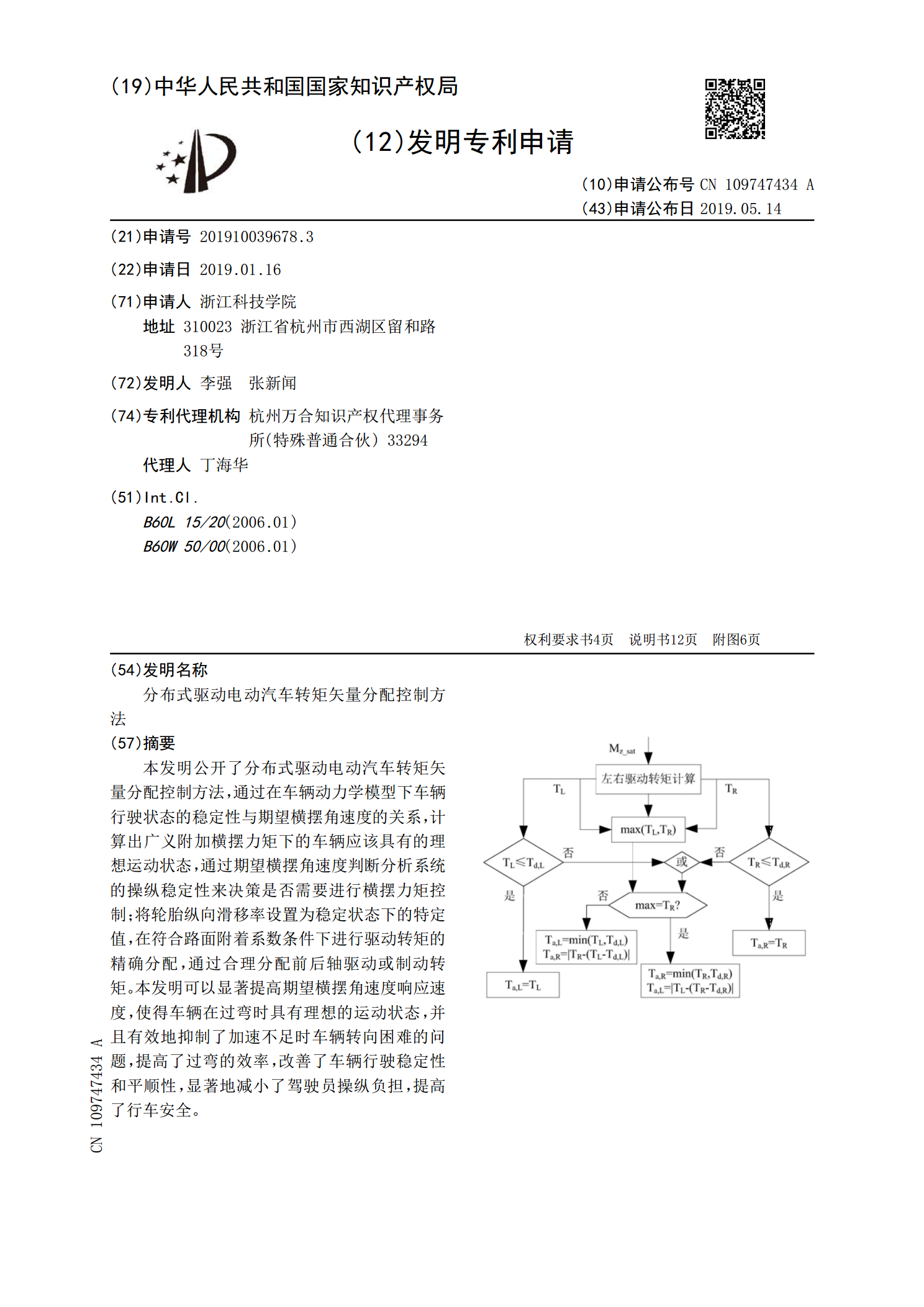
本发明公开了分布式驱动电动汽车转矩矢量分配控制方法,通过在车辆动力学模型下车辆行驶状态的稳定性与期望横摆角速度的关系,计算出广义附加横摆力矩下的车辆应该具有的理想运动状态,通过期望横摆角速度判断分析系统的操纵稳定性来决策是否需要进行横摆力矩控制;将轮胎纵向滑移率设置为稳定状态下的特定值,在符合路面附着系数条件下进行驱动转矩的精确分配,通过合理分配前后轴驱动或制动转矩。本发明可以显著提高期望横摆角速度响应速度,使得车辆在过弯时具有理想的运动状态,并且有效地抑制了加速不足时车辆转向困难的问题,提高了过弯的效率

四轮独立电驱动汽车转向控制策略研究的开题报告.docx
四轮独立电驱动汽车转向控制策略研究的开题报告一、选题的背景和意义汽车是现代社会最重要的交通工具之一,随着科技的不断发展,电动汽车逐渐成为了世界上各大汽车生产商的研究热点。传统的汽车转向控制是由发动机带动转向系统实现的,而电动汽车由于其独特的动力性质,需要一种新型的转向控制策略。四轮独立电驱动汽车是研发电动汽车的一个重要方向,本文将针对四轮独立电驱动汽车的转向控制策略进行研究,探究一种适合四轮独立电驱动汽车的转向控制策略,为电动汽车的研究提供参考意义。二、研究的内容和目标本文将对四轮独立电驱动汽车的转向控制