
多全向移动平台协同运动控制技术研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多全向移动平台协同运动控制技术研究的任务书.docx
多全向移动平台协同运动控制技术研究的任务书一、任务背景随着机器人技术的不断发展,可移动机器人在工业自动化、医疗护理、军事领域等方面的应用越来越广泛。多全向移动平台作为移动机器人中的重要一类,具有机动性强、适应性好、灵活性高等特点,已成为移动机器人研究的热点之一。多全向移动平台协同运动控制技术是多个移动平台之间协作运动的关键技术,对于提高移动平台的协同工作能力和提高整个系统的智能化水平具有重要意义。二、研究意义1.提高移动平台的操控性:通过多全向移动平台协同运动控制技术的研究,可以提高移动平台的操控性和适应

多全向移动平台协同运动控制技术研究的开题报告.docx
多全向移动平台协同运动控制技术研究的开题报告一、研究背景目前,机器人技术的应用越来越广泛,其中多全向移动平台得到了广泛研究和应用。多全向移动平台由多个驱动轮组成,具有卓越的平移能力和灵活性,在工业生产、物流配送、家庭服务等领域具有广泛应用前景。然而,多全向移动平台同时运动时存在移动轨迹的交叉、径向干涉等问题,因此需要研究多全向移动平台协同运动控制技术,以确保机器人的安全和运动效率。二、研究目的和意义本文旨在研究多全向移动平台协同运动控制技术,构建协同控制系统,以实现多个移动平台的合作协同,实现高效、安全、

8Mecanum轮重载协同驱动全向移动平台.pdf
本发明公开了8Mecanum轮重载协同驱动全向移动平台,包括:手动操作杆及控制链路,所述控制链路与主控制单元连接,所述主控制单元内部设有微处理器。所述手动操作杆与综合控制器连接,所述综合控制器与动力电池组连接。所述动力电池组通过动力电缆与8组Mecanum轮移动装置连接,所述8Mecanum轮重载协同驱动全向移动平台本体四周设有传感器,所述传感器采用超声波传感器。本发明本体四周设有传感器,遇到意外时能进行紧急制动,安全性能得到大大提升,并且本发明的动力电池组采用低压铅酸电池动力电池组,价格便宜,成本低,并
全向移动平台.pdf
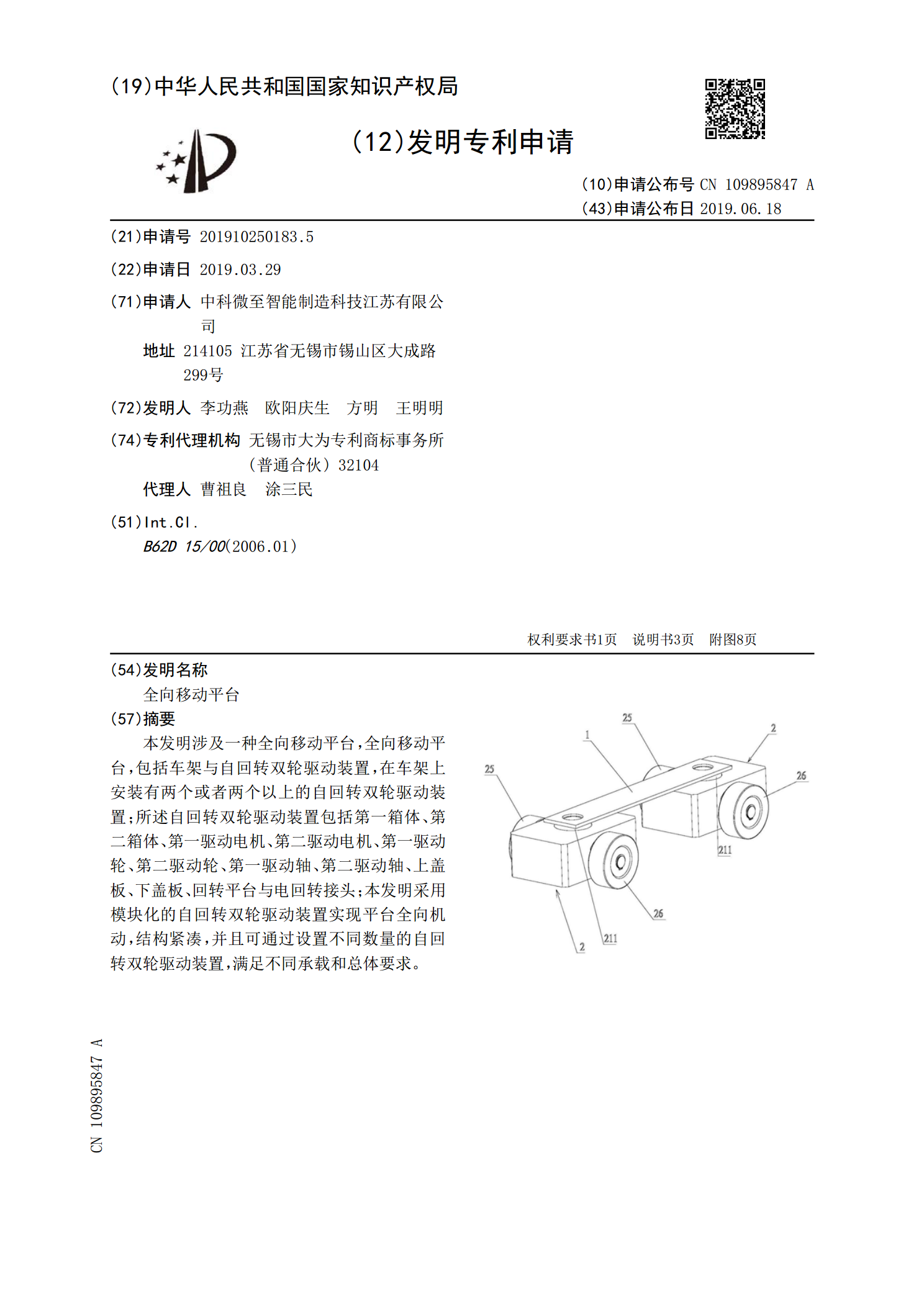
本发明涉及一种全向移动平台,全向移动平台,包括车架与自回转双轮驱动装置,在车架上安装有两个或者两个以上的自回转双轮驱动装置;所述自回转双轮驱动装置包括第一箱体、第二箱体、第一驱动电机、第二驱动电机、第一驱动轮、第二驱动轮、第一驱动轴、第二驱动轴、上盖板、下盖板、回转平台与电回转接头;本发明采用模块化的自回转双轮驱动装置实现平台全向机动,结构紧凑,并且可通过设置不同数量的自回转双轮驱动装置,满足不同承载和总体要求。

基于多电机协同的某模拟平台智能控制技术研究的任务书.docx
基于多电机协同的某模拟平台智能控制技术研究的任务书任务书1.背景与研究意义随着科技的不断发展,计算机技术越来越成为人们生活和工作中不可或缺的一部分。计算机模拟技术可以在实际系统不可行或不方便实验的情况下,对于各种系统进行仿真实验,以便更好的研究、测试、分析和改善系统的性能。实时性和准确性是计算机模拟技术的主要特征。多电机协同技术是一种以电机为基础的智能控制技术,它通过协同控制多个电机,有效提高了系统的性能和效率。在机械、电气和自动化领域,多电机协同技术被广泛应用于各种系统的控制中。本研究旨在通过对某模拟平