
8Mecanum轮重载协同驱动全向移动平台.pdf

fa****楠吖

1/8
2/8

3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

8Mecanum轮重载协同驱动全向移动平台.pdf
本发明公开了8Mecanum轮重载协同驱动全向移动平台,包括:手动操作杆及控制链路,所述控制链路与主控制单元连接,所述主控制单元内部设有微处理器。所述手动操作杆与综合控制器连接,所述综合控制器与动力电池组连接。所述动力电池组通过动力电缆与8组Mecanum轮移动装置连接,所述8Mecanum轮重载协同驱动全向移动平台本体四周设有传感器,所述传感器采用超声波传感器。本发明本体四周设有传感器,遇到意外时能进行紧急制动,安全性能得到大大提升,并且本发明的动力电池组采用低压铅酸电池动力电池组,价格便宜,成本低,并

重载自驱动全向轮及其设计方法.pdf
本发明涉及一种重载自驱动全向轮及其设计方法,属于全向轮技术领域。其全向轮体(121)由轮辐(1212)、沿圆周方向均匀分布在轮辐外圈的6-16个辊子心轴(1211)、安装在辊子心轴(1211)上的小辊子(1210)、两个使轮辐(1212)与辊子心轴(1211)定位的端盖(1214)组成,端盖(1214)与辊子心轴(1211)通过轴承(1213)连接,端盖(1214)与轮辐(1212)为固定连接;上述每个辊子心轴(1211)与传动轴(122)轴线空间所成夹角相等为30-60度,相邻小辊子在空间分布上具有重合

一种重载全向移动AGV运载平台.pdf
本发明公开一种重载全向移动AGV运载平台,包括全向移动系统、驱动系统、独立悬挂机构、电源系统、升降机构、运动控制系统和吊装机构。全向移动系统包括车体骨架、底盘以及周向均匀分布在车体骨架上的双排麦克纳姆轮,四套升降机构位于车体骨架四周均匀分布,四组吊装机构安装于车身的四周;所述车体骨架采用高强度方钢管焊接制成,外壳采用全封闭设计;运动控制系统包含有自动收线器、无线接收器,能够满足有线控制与无线控制。本发明结构简单,控制灵活,可实现全方位运行,且有体积小,承载能力大,具有很高的刚度和强度,本发明可使用无线控制

基于球轮全向驱动的运动平台.pdf
本发明涉及一种能够自主运动的智能运动平台,特别涉及一种通过控制三个球轮的运动从而实现平台整体的全向运动的机构,属于电机驱动、传感器测距、无线通讯和自动控制技术领域;具体包括三套同样的球轮驱动机械结构和三个电机驱动器、环境感知系统和平台控制系统;环境感知系统对周围环境探测后,将得到的环境信息传递给平台控制系统的平台主控制模块;平台主控制模块处理得出控制指令,发给电机驱动器控制模块,球轮在驱动电机的控制下滚动,实现平台的运动。本发明基于球体滚动的全向性原理,可实现人工操控与自主运行两种工作模式,以及单平台运行
全向移动平台及其舵轮和驱动轮.pdf
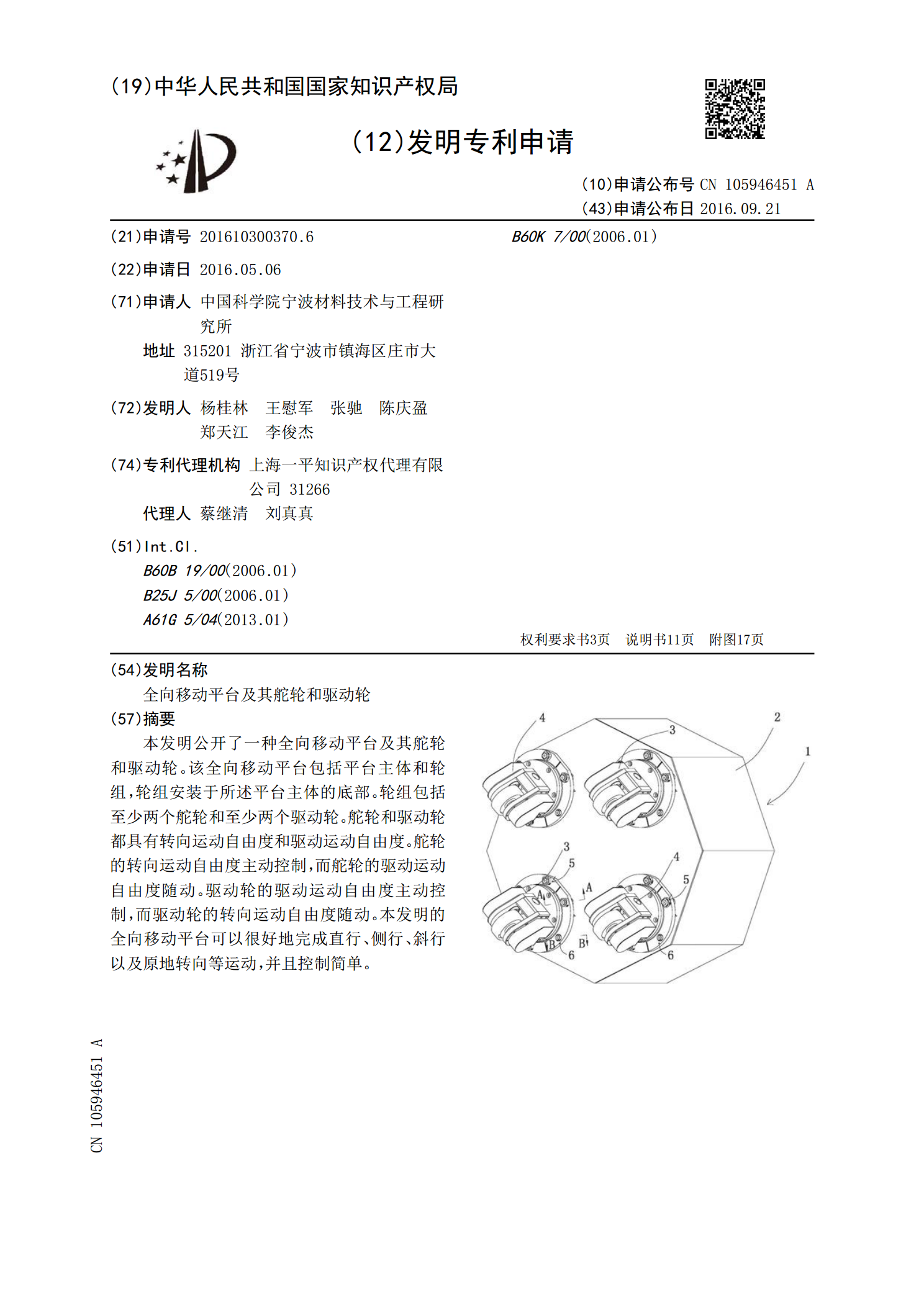
本发明公开了一种全向移动平台及其舵轮和驱动轮。该全向移动平台包括平台主体和轮组,轮组安装于所述平台主体的底部。轮组包括至少两个舵轮和至少两个驱动轮。舵轮和驱动轮都具有转向运动自由度和驱动运动自由度。舵轮的转向运动自由度主动控制,而舵轮的驱动运动自由度随动。驱动轮的驱动运动自由度主动控制,而驱动轮的转向运动自由度随动。本发明的全向移动平台可以很好地完成直行、侧行、斜行以及原地转向等运动,并且控制简单。