
麦弗逊独立悬架受力分析及计算.ppt

悠柔****找我


1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

麦弗逊独立悬架受力分析及计算.ppt
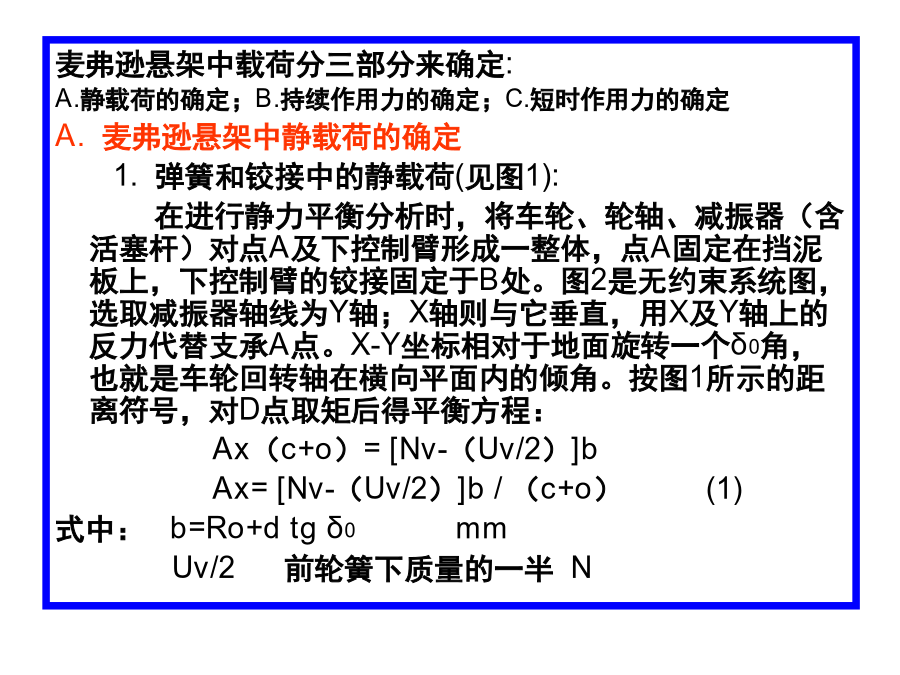
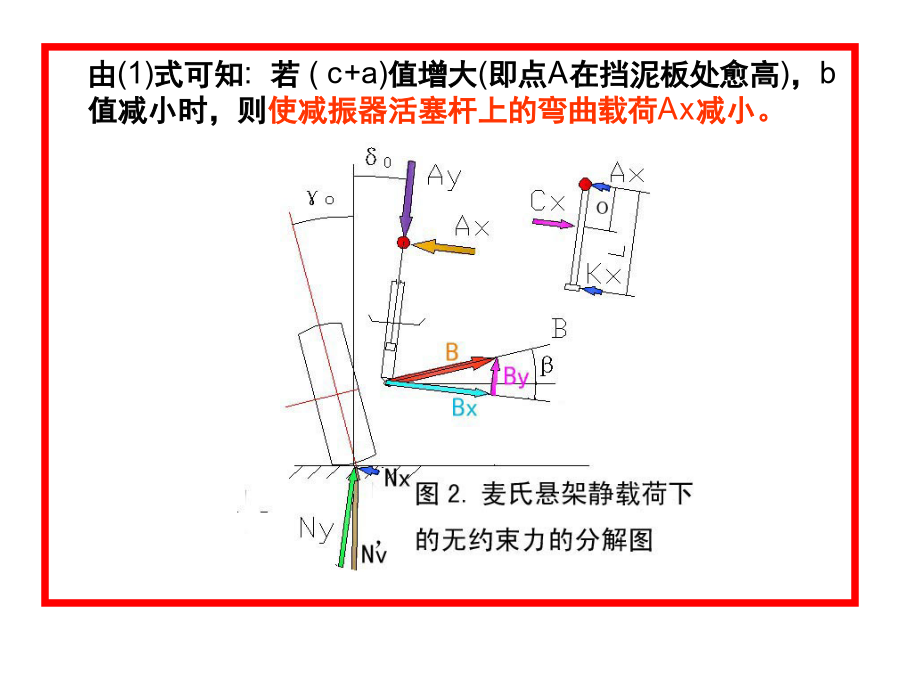
麦弗逊(Macpherson)悬架中的作用力分析与计算方法本文是我根据所收集到的一些有关资料,经消化吸收后并结合自己的实践经验编写的,仅供参考。麦弗逊悬架中载荷分三部分来确定:A.静载荷的确定;B.持续作用力的确定;C.短时作用力的确定A.麦弗逊悬架中静载荷的确定1.弹簧和铰接中的静载荷(见图1):在进行静力平衡分析时,将车轮、轮轴、减振器(含活塞杆)对点A及下控制臂形成一整体,点A固定在挡泥板上,下控制臂的铰接固定于B处。图2是无约束系统图,选取减振器轴线为Y轴;X轴则与它垂直,用X及Y轴上的反力代替支

一种麦弗逊独立悬架.pdf
本发明提供了一种麦弗逊独立悬架,包括:转向节;下摆臂,所述下摆臂外端连接所述转向节,内端连接车身;减振器,所述减振器下端连接转向节,上端通过关节轴承连接橡胶垫;所述橡胶垫硫化固定在橡胶垫支座上,所述橡胶垫支座固定在车身上。本发明能够很好地消除车轮上下运动时橡胶垫对减振器产生的侧向力影响,延长减振器寿命,提高车辆的平顺性。

麦弗逊独立悬架的建模仿真与优化.pptx
麦弗逊独立悬架的建模仿真与优化目录添加章节标题麦弗逊独立悬架的背景与意义悬架系统的重要性麦弗逊独立悬架的应用领域研究目的与意义麦弗逊独立悬架的建模方法与仿真分析建模方法介绍仿真模型的建立与验证仿真分析结果麦弗逊独立悬架的优化方法与实现优化方法介绍优化模型的建立与求解优化结果分析麦弗逊独立悬架的实验验证与性能评估实验设备与测试方法实验结果与分析性能评估与对比结论与展望研究成果总结未来研究方向与展望THANKYOU

麦弗逊悬架运动仿真分析.docx
麦弗逊悬架运动仿真分析摘要一种三维模型提出了一个麦克弗森型转向悬架的运动行为。通常的方法提出了主要参数的确定(主销后倾角,车轮外倾角,转向角等),在系统的操作因素的作用中,(这些参数)影响车辆的操纵。输入数据一方面是悬架和转向几何,另一方面是支柱的移动和转向轮转向的转向,这是通过监测车辆而获得的。该模型已被施加到一个标准的车辆,其结果的有效性已被证实。关键词:计算机模拟;汽车悬架;麦弗森;三维运动模型。1.导言麦弗逊悬架是目前被大量应用在大多数中小型轿车上的系统。在麦弗逊悬架通常的结构中,其组成是一个支柱

一种麦弗逊独立悬架总成.pdf
本发明提供了一种麦弗逊独立悬架总成,属于汽车悬架技术领域。其包括:减震器、转向节、转向节支撑柱、下摆臂、定位转向拉杆和支撑架,减震器固定安装在转向节支撑柱上,下摆臂安装在支撑架上,支撑架固定在转向节支撑柱上,定位转向拉杆第一端通过定位孔与支撑架连接,定位转向拉杆第二端与下摆臂连接,通过主销把转向节安装在转向节支撑柱上,解决了前轮转向过程中,转向节支撑柱跟随转动现象,通过定位转向拉杆限制转向节支撑柱与下摆臂自由度,解决了悬架总成自由度过多问题,更好地发挥麦弗逊前独立悬架优点。