
新型仿人变刚度肘关节的研究与设计的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

新型仿人变刚度肘关节的研究与设计的任务书.docx
新型仿人变刚度肘关节的研究与设计的任务书任务书项目名称:新型仿人变刚度肘关节的研究与设计研究背景及意义:仿人机器人是近年来发展较快的一个领域,而仿人机器人的关键技术之一就是机器人的关节技术,尤其是肘关节的设计。在仿人机器人的应用中,肘关节是极其重要的,能够影响机器人的灵活性、稳定性和精度。然而目前的大多数仿人机器人肘关节都只能做到单一的精度,稳定性和灵活性问题解决,而无法兼顾三者,特别是在一些极端工作环境下,传统的肘关节设计更是无法胜任。因此,本项目旨在研究开发一种可在不同工作环境下自适应调节肘关节的刚度
仿人肘关节型机器人变刚度关节.pdf
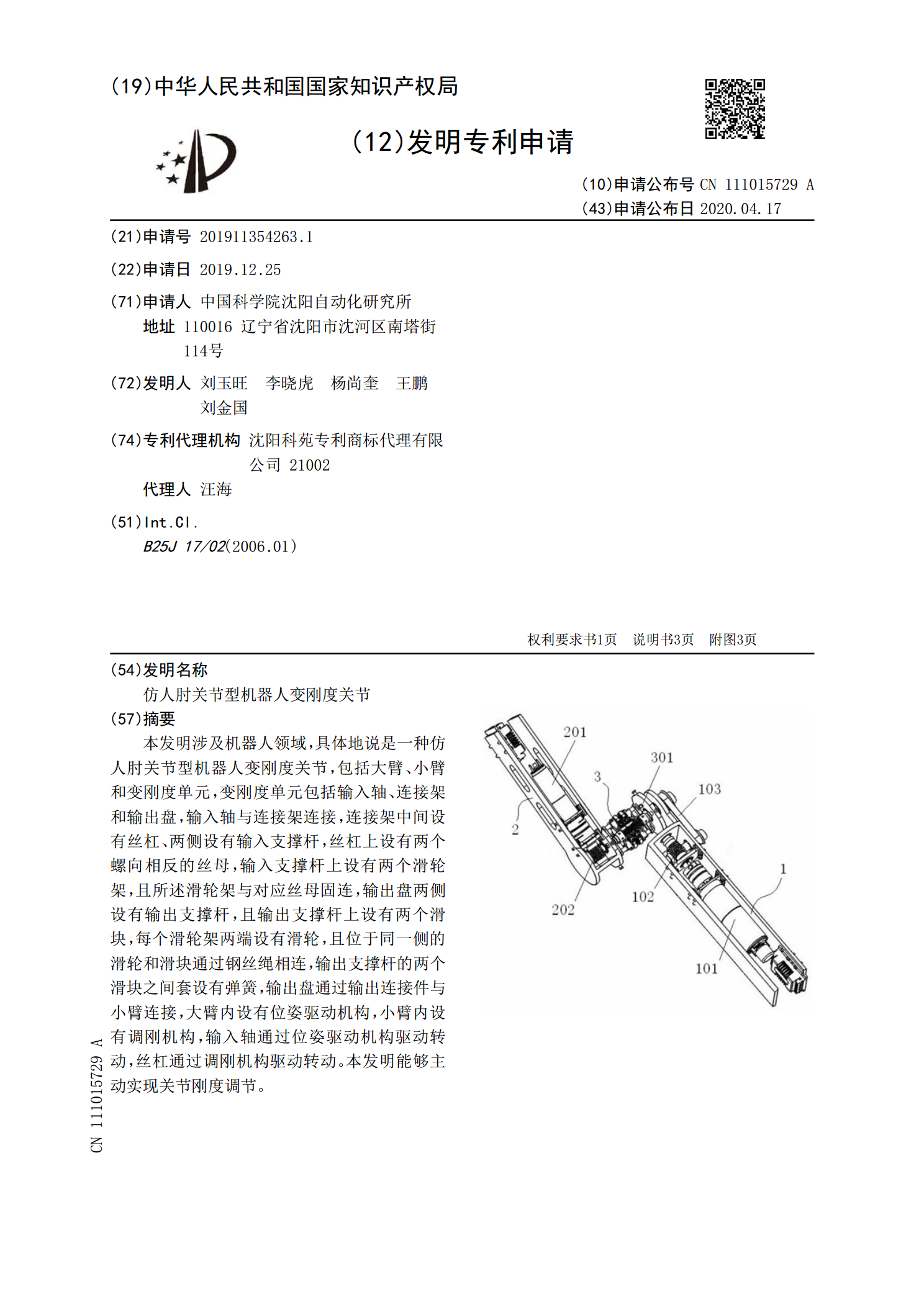
本发明涉及机器人领域,具体地说是一种仿人肘关节型机器人变刚度关节,包括大臂、小臂和变刚度单元,变刚度单元包括输入轴、连接架和输出盘,输入轴与连接架连接,连接架中间设有丝杠、两侧设有输入支撑杆,丝杠上设有两个螺向相反的丝母,输入支撑杆上设有两个滑轮架,且所述滑轮架与对应丝母固连,输出盘两侧设有输出支撑杆,且输出支撑杆上设有两个滑块,每个滑轮架两端设有滑轮,且位于同一侧的滑轮和滑块通过钢丝绳相连,输出支撑杆的两个滑块之间套设有弹簧,输出盘通过输出连接件与小臂连接,大臂内设有位姿驱动机构,小臂内设有调刚机构,输

基于气缸的仿人变刚度关节设计与控制研究.docx
基于气缸的仿人变刚度关节设计与控制研究标题:基于气缸的仿人变刚度关节设计与控制研究摘要:随着机器人技术的不断发展,仿真人机器人的研究逐渐成为热门领域。在仿真人机器人中,关节的设计和控制是十分重要的一环。本文以基于气缸的仿人变刚度关节为研究对象,结合具体的设计与控制方法,探索了一种新颖的仿人变刚度关节设计方案。关键词:仿人机器人、变刚度关节、气缸、设计、控制1.引言人类关节具有非常复杂的运动特征,并且能够根据外部环境的变化调节关节的刚度。这种能力使得人类能够灵活地适应不同的任务和环境。因此,仿人机器人中关节

变刚度仿蛇机器人机构设计与柔顺控制研究.docx
变刚度仿蛇机器人机构设计与柔顺控制研究标题:变刚度仿蛇机器人机构设计与柔顺控制研究摘要:变刚度仿蛇机器人是一种具有灵活性、适应性和高机动性的新型机器人。本论文主要探讨了变刚度仿蛇机器人的机构设计和柔顺控制方法。首先,介绍了变刚度仿蛇机器人的研究背景和意义。接着,详细阐述了变刚度仿蛇机器人的机构设计原理和实现方法。最后,探讨了柔顺控制算法在变刚度仿蛇机器人中的应用,并进行了实验验证。研究结果表明,变刚度仿蛇机器人具有较高的灵活性和适应性,并且柔顺控制算法能够有效地提高机器人的运动性能和稳定性。关键词:变刚度

含变刚度膝关节的仿人机器腿设计与研究的开题报告.docx
含变刚度膝关节的仿人机器腿设计与研究的开题报告一、选题背景随着人类社会的科技进步和经济发展,机器人已成为现代工业生产和科学研究的基础设施之一。在机器人应用领域,机器腿也是研究的热点之一。仿人机器腿的设计和研究是机器人学和生物机械学研究的重要分支。它的研究理论以人体运动、神经、生理学和力学为基础。机器腿不仅可以用于工业制造,还可以应用在人工肢体、探测器和机器人等领域。传统的仿人机器腿大多采用电机驱动或液压驱动的方式,关节刚度较高,难以实现人体运动的柔韧性。为了更好地模拟人类下肢,一些学者已经开始将仿生学原理